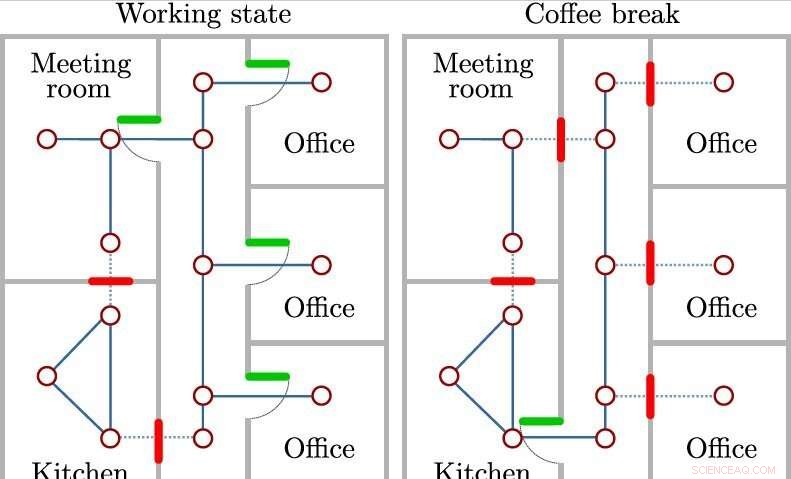
Un semplice esempio di configurazioni ripetute in un ufficio. Credito:Nardi &Stachniss.
Per navigare efficacemente nell'ambiente circostante, i robot in genere pianificano percorsi basati su mappe pre-progettate dell'ambiente in cui stanno operando e osservazioni raccolte dai loro sensori. Sebbene questo tipo di strategia di navigazione possa essere utile in ambienti semplici e statici, è tutt'altro che ideale in quelli più complessi e imprevedibili, come quelli che si trovano nel mondo reale.
Infatti, anche se le mappe fornite a un robot sono state compilate con cura e sono accurate, non tengono conto di ostacoli imprevisti o cambiamenti nell'ambiente. Poiché la maggior parte degli ambienti in cui i robot dovrebbero eventualmente essere impiegati (ad esempio ospedali, centri commerciali, aeroporti, ecc.) sono altamente imprevedibili e in rapida evoluzione, approcci di navigazione che si basano principalmente su mappe pre-progettate possono portare a traiettorie e strategie di navigazione scadenti.
Consapevole di questo problema, due ricercatori dell'Università di Bonn hanno recentemente sviluppato un approccio che potrebbe consentire ai robot di navigare in ambienti interni in rapido cambiamento in modo più efficace per periodi di tempo prolungati. Questo nuovo approccio, presentato in un articolo pre-pubblicato su arXiv, funziona essenzialmente catturando schemi ripetuti nel modo in cui un ambiente sta cambiando e sfruttando questa conoscenza per prendere decisioni di navigazione informate.
"L'idea di questo studio è che molti cambiamenti negli ambienti interni avvengono seguendo schemi spaziali ripetuti, ad esempio porte che si aprono e si chiudono contemporaneamente, "Lorenzo Nardi, uno dei ricercatori che ha condotto lo studio, detto TechXplore . "I robot che vengono utilizzati per periodi di tempo più lunghi in questi ambienti possono osservare e raccogliere continuamente informazioni al riguardo e sfruttare queste conoscenze per pianificare strategie migliori per la navigazione".
In uno studio precedente, lo stesso team di ricercatori ha sviluppato un approccio che raccoglie informazioni su come un terreno sta influenzando la navigazione di un robot all'aperto e quindi lo utilizza per calcolare traiettorie che riducono al minimo le vibrazioni a bordo e il consumo energetico. Nel loro nuovo studio, hanno deciso di concentrarsi sulla navigazione robotica al chiuso, prevedendo le diverse configurazioni che un ambiente assume nel tempo.
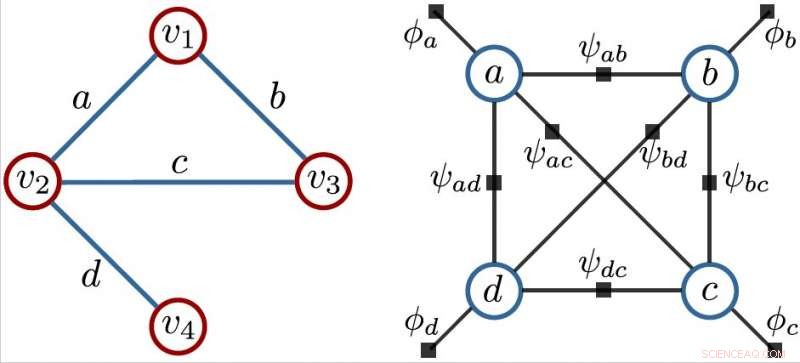
Un esempio di topologia (a sinistra) e il modello grafico probabilistico utilizzato dai ricercatori nel loro lavoro (a destra). Credito:Nardi &Stachniss.
L'approccio che hanno sviluppato è progettato per migliorare la navigazione interna di un robot modellando modelli di cambiamenti ambientali dinamici e sfruttando queste informazioni per pianificare percorsi per il robot. Usando il loro approccio, un robot incontra quindi meno ostacoli e blocca i passaggi lungo il suo percorso verso una determinata posizione.
"Il vantaggio principale del nostro approccio è che considera una rappresentazione dell'ambiente in grado di integrare continuamente nuove osservazioni sull'ambiente, " ha spiegato Nardi. "Questa rappresentazione consente di pianificare traiettorie migliori nel tempo rispetto a avidi pianificatori di percorsi più brevi basati su mappe geometriche statiche dell'ambiente".
I ricercatori hanno valutato il loro approccio applicandolo a una serie di scenari in quattro diversi ambienti interni:un piccolo ufficio, un ufficio medio, un grande ufficio e un ospedale. In questi esperimenti, il loro approccio ha funzionato molto bene, progettare percorsi efficaci che tengano conto dei cambiamenti ambientali. Inoltre, hanno confrontato il loro approccio con le tecniche esistenti basate su mappe statiche e hanno scoperto che genera percorsi più brevi e migliori quando il robot viene utilizzato per periodi di tempo più lunghi.
"I nostri risultati mostrano che, sebbene la complessità del sistema di navigazione aumenti, il nostro approccio porta il robot nel tempo a fornire previsioni accurate sulle configurazioni dell'ambiente e sfruttare questa conoscenza per navigare lungo percorsi più brevi, " ha detto Nardi.
Nel futuro, l'approccio proposto da Nardi e dal suo collega Cyrill Stachniss potrebbe aiutare a migliorare la navigazione dei robot in ambienti interni in rapida evoluzione. Potrebbe rivelarsi particolarmente utile in ambienti in cui l'efficienza di un robot è fondamentale, come gli ospedali. I ricercatori stanno ora pianificando di testare il loro approccio utilizzando una piattaforma robotica reale, poiché ciò alla fine consentirà loro di valutare se i risultati iniziali raccolti sono ancora validi in contesti di vita reale.
"Un'altra direzione interessante per la ricerca futura potrebbe essere cercare di integrare comportamenti dinamici ad alta frequenza, come altri agenti dinamici in movimento, nel quadro, " ha detto Nardi.
© 2019 Science X Network