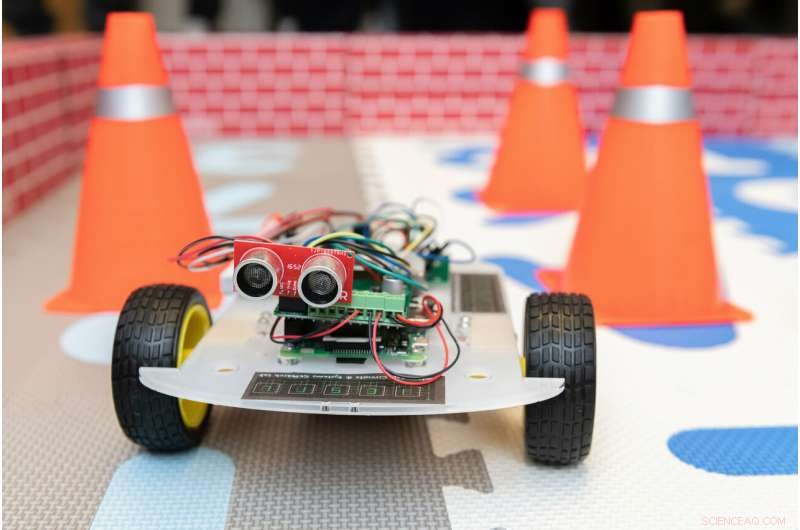
Un'auto robotica controllata da un chip ibrido a bassissima potenza viene mostrata in un'arena per dimostrare la sua capacità di apprendere e collaborare con un altro robot. Credito:Allison Carter, Georgia Tech
Un chip ibrido a bassissima potenza ispirato al cervello potrebbe aiutare a dare ai robot delle dimensioni di un palmo la capacità di collaborare e imparare dalle loro esperienze. In combinazione con le nuove generazioni di motori e sensori a bassa potenza, il nuovo circuito integrato specifico per l'applicazione (ASIC), che funziona con milliwatt di potenza, potrebbe aiutare i robot intelligenti dello sciame a funzionare per ore invece che per minuti.
Per risparmiare energia, i chip utilizzano un processore ibrido digitale-analogico nel dominio del tempo in cui l'ampiezza dell'impulso dei segnali codifica le informazioni. L'IC della rete neurale supporta sia la programmazione basata su modello che l'apprendimento per rinforzo collaborativo, potenzialmente fornendo ai piccoli robot maggiori capacità di ricognizione, ricerca e salvataggio e altre missioni.
I ricercatori del Georgia Institute of Technology hanno dimostrato auto robotiche guidate dagli esclusivi ASIC alla Conferenza internazionale sui circuiti a stato solido IEEE (ISSCC) del 2019. La ricerca è stata sponsorizzata dalla Defense Advanced Research Projects Agency (DARPA) e dalla Semiconductor Research Corporation (SRC) attraverso il Center for Brain-inspired Computing Enabling Autonomous Intelligence (CBRIC).
"Stiamo cercando di portare l'intelligenza a questi robot molto piccoli in modo che possano conoscere il loro ambiente e muoversi autonomamente, senza infrastrutture, " disse Arijit Raychowdhury, professore associato presso la School of Electrical and Computer Engineering della Georgia Tech. "Per riuscirci, vogliamo portare concetti di circuito a bassa potenza a questi dispositivi molto piccoli in modo che possano prendere decisioni da soli. C'è una grande richiesta di piccoli, ma robot capaci che non richiedono infrastrutture."
Le auto dimostrate da Raychowdhury e dagli studenti laureati Ningyuan Cao, Muya Chang e Anupam Golder navigano in un'arena pavimentata da tamponi di gomma e circondata da pareti di blocchi di cartone. Mentre cercano un obiettivo, i robot devono evitare i coni di traffico e l'un l'altro, imparando dall'ambiente mentre vanno e comunicando continuamente tra loro.
Le auto utilizzano sensori inerziali e ad ultrasuoni per determinare la loro posizione e rilevare gli oggetti intorno a loro. Le informazioni dai sensori vanno all'ASIC ibrido, che funge da "cervello" dei veicoli. Le istruzioni quindi vanno a un controller Raspberry Pi, che invia istruzioni ai motori elettrici.
Nei robot palmari, tre principali sistemi consumano energia:i motori e i controller utilizzati per guidare e sterzare le ruote, il processore, e il sistema di rilevamento. Nelle vetture costruite dal team di Raychowdhury, l'ASIC a bassa potenza significa che i motori consumano la maggior parte della potenza. "Siamo stati in grado di ridurre la potenza di calcolo a un livello in cui il budget è dominato dalle esigenze dei motori, " Egli ha detto.
Il team sta lavorando con i collaboratori su motori che utilizzano la tecnologia microelettromeccanica (MEMS) in grado di funzionare con molta meno potenza rispetto ai motori convenzionali.
"Vorremmo costruire un sistema in cui il potere di rilevamento, comunicazioni e computer, e l'attuazione sono più o meno allo stesso livello, nell'ordine delle centinaia di milliwatt, " disse Raychowdhury, che è il Professore Associato di ON Semiconductor nella Scuola di Ingegneria Elettrica e Informatica. "Se riusciamo a costruire questi robot palmari con motori e controller efficienti, dovremmo essere in grado di fornire un'autonomia di diverse ore con un paio di batterie AA. Ora abbiamo una buona idea del tipo di piattaforme informatiche di cui abbiamo bisogno per fornire questo, ma abbiamo ancora bisogno degli altri componenti per recuperare".
Nel calcolo nel dominio del tempo, le informazioni vengono trasportate su due diverse tensioni, codificato nella larghezza degli impulsi. Ciò conferisce ai circuiti i vantaggi di efficienza energetica dei circuiti analogici con la robustezza dei dispositivi digitali.
"La dimensione del chip è ridotta della metà, and the power consumption is one-third what a traditional digital chip would need, " said Raychowdhury. "We used several techniques in both logic and memory designs for reducing power consumption to the milliwatt range while meeting target performance."
With each pulse-width representing a different value, the system is slower than digital or analog devices, but Raychowdhury says the speed is sufficient for the small robots. (A milliwatt is a thousandth of a watt).
Two robotic cars controlled by an ultra-low power hybrid chip are shown in a test arena where they will demonstrate an ability to learn and collaborate. Credit:Allison Carter, Georgia Tech
"For these control systems, we don't need circuits that operate at multiple gigahertz because the devices aren't moving that quickly, " he said. "We are sacrificing a little performance to get extreme power efficiencies. Even if the compute operates at 10 or 100 megahertz, that will be enough for our target applications."
The 65-nanometer CMOS chips accommodate both kinds of learning appropriate for a robot. The system can be programmed to follow model-based algorithms, and it can learn from its environment using a reinforcement system that encourages better and better performance over time—much like a child who learns to walk by bumping into things.
"You start the system out with a predetermined set of weights in the neural network so the robot can start from a good place and not crash immediately or give erroneous information, " Raychowdhury said. "When you deploy it in a new location, the environment will have some structures that it will recognize and some that the system will have to learn. The system will then make decisions on its own, and it will gauge the effectiveness of each decision to optimize its motion."
Communication between the robots allow them to collaborate to seek a target.
"In a collaborative environment, the robot not only needs to understand what it is doing, but also what others in the same group are doing, " he said. "They will be working to maximize the total reward of the group as opposed to the reward of the individual."
With their ISSCC demonstration providing a proof-of-concept, the team is continuing to optimize designs and is working on a system-on-chip to integrate the computation and control circuitry.
"We want to enable more and more functionality in these small robots, " Raychowdhury added. "We have shown what is possible, and what we have done will now need to be augmented by other innovations."