Attestazione:DARPA
All'inizio di questo mese, DARPA ha annunciato che sta lanciando un nuovo programma di piattaforme microrobotiche indipendenti a breve raggio (SHRIMP). SHRIMP svilupperà e dimostrerà piattaforme robotiche da micro a milli per scenari provocati da disastri naturali e critici.
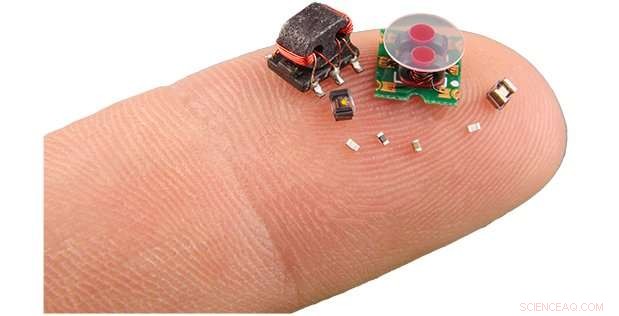
Come Spettro IEEE mettilo, è un programma per sviluppare "robot in scala di insetti" per il ripristino di emergenza e ambienti ad alto rischio. L'argomento è abbastanza semplice da capire ed è anche ovvio che i mezzi per realizzare queste piattaforme sono difficili.
DARPA, ha detto il suo annuncio, dovrà affrontare la sfida di "creare microrobotici estremamente vincolati a SWaP". SWaP si riferisce alla dimensione, peso e potenza.
L'Agenzia per i progetti di ricerca avanzata della difesa degli Stati Uniti (DARPA) è interessata a farlo bene per le missioni di ricerca e salvataggio. Un potente robot gigante può essere abbastanza determinato da compiere atti eroici come eliminare i detriti, ma è lo sciame di insetti-robot che ha l'attenzione di DARPA per gli scenari di ricerca e salvataggio che richiedono di muoversi attraverso minuscole crepe e fessure. Spettro IEEE 's Evan Ackerman ha osservato che nella ricerca e nel salvataggio, "starai meglio con un sacco di robot molto piccoli che coprono più terreno possibile."
SHRIMP di DARPA sta per piattaforme microrobotiche indipendenti a corto raggio. Detto ciò, il diavolo sarà nei dettagli delle parti componenti inclusi gli attuatori, sistemi di mobilità e accumulo di energia.
Taglia, il peso, e il potere sono le tre sfide da affrontare. Dei tre, il potere è il più grande, disse Ackerman. Tener conto di, piccoli robot slegati e quanto velocemente potrebbero rimanere senza energia.
"La maggior parte delle piattaforme di micro-robotica si basa su cavi per l'alimentazione, in lavorazione, o controllo, e sono significativamente vincolati dalla tecnologia di attuazione inefficiente dal punto di vista energetico e dai dispositivi di accumulo di energia limitata, " ha detto l'annuncio DARPA.
Eppure vogliono vedere i robot da micro a millioperare in modo indipendente. A sua volta, "creare fonti di alimentazione e convertitori compatti in grado di supportare meccanismi di attuazione ad alta tensione e ridurre significativamente il consumo della batteria diventa fondamentale".
DARPA sta gettando tutto questo in una sfida. Ackerman ha affermato che la competizione potrebbe svolgersi intorno a marzo 2019. Puoi aspettarti di vedere la competizione in due parti, uno per attuatori e generatori e l'altro per robot completi.
Il rapporto di Ackerman conteneva maggiori dettagli sulla competizione:"La DARPA prevede che le squadre svilupperanno sistemi che pesano meno di un grammo e si adattano a un centimetro cubo". Ha anche elencato alcuni degli eventi di competizione per la competizione di attuatori e fonti di alimentazione nelle quinte. Includono salto in alto, sollevamento pesi di massa, e tiro a segno. Lo shortput è il punto in cui un sistema microrobotico di alimentazione dell'attuatore deve spingere una massa orizzontalmente, "con la distanza misurata solo nella direzione orizzontale come criterio di valutazione".
Gli abstract sono in scadenza il 10 agosto e le proposte sono previste per il 26 settembre. Le innovazioni e le scoperte della ricerca che ne derivano potrebbero avere un impatto oltre le missioni di ricerca e salvataggio. PCMag citato il dottor Ronald Polcawich, un manager del programma DARPA.
"Mentre l'obiettivo di SHRIMP è sviluppare su piccola scala, piattaforme robotiche indipendenti, prevediamo che le scoperte fatte attraverso la nostra ricerca sugli attuatori e sugli accumulatori di energia potrebbero rivelarsi vantaggiose per una serie di campi attualmente vincolati da queste sfide tecniche, dalle protesi allo sterzo ottico".
© 2018 Tech Xplore














