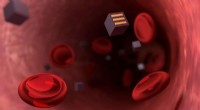
Un robot morbido, attaccato a un pallone e immerso in una colonna d'acqua trasparente, immersioni e superfici, poi si tuffa e riaffiora, come un pesce che insegue le mosche. I robot morbidi hanno già eseguito questo tipo di trucco. Ma a differenza della maggior parte dei robot morbidi, questo è realizzato e gestito senza parti rigide o elettroniche. Dentro, un morbido, il computer di gomma dice al pallone quando salire o scendere. Per la prima volta, questo robot si basa esclusivamente su una logica digitale morbida.
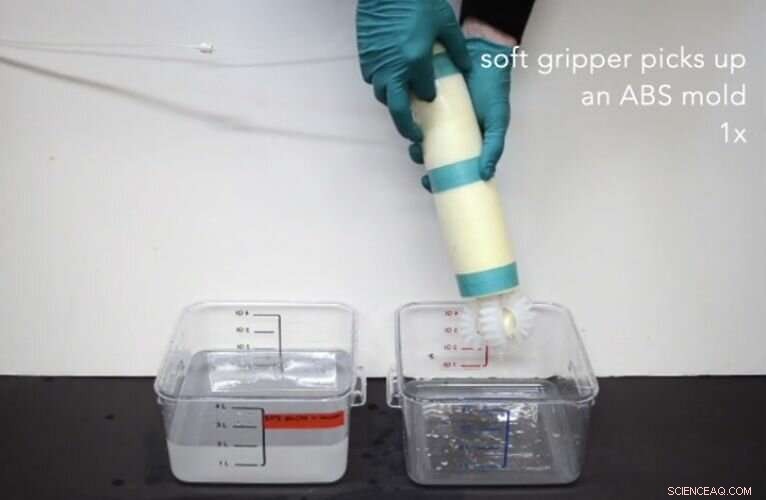
Nell'ultima decade, i robot morbidi sono entrati nel mondo della robotica dominato dal metallo. Le pinze realizzate con materiali gommosi in silicone sono già utilizzate nelle catene di montaggio:artigli imbottiti gestiscono frutta e verdura delicate come pomodori, sedano, e salsicce, o estrarre bottiglie e maglioni dalle casse. Nei laboratori, le pinze possono raccogliere pesci scivolosi, topi vivi, e anche insetti, eliminando la necessità di una maggiore interazione umana.
I robot morbidi richiedono già sistemi di controllo più semplici rispetto ai loro omologhi rigidi. Le pinze sono così conformi, semplicemente non possono esercitare una pressione sufficiente per danneggiare un oggetto e senza la necessità di calibrare la pressione, è sufficiente un semplice interruttore on-off. Ma fino ad ora, la maggior parte dei robot morbidi fa ancora affidamento su un hardware:le valvole metalliche aprono e chiudono i canali d'aria che azionano le pinze e i bracci gommosi, e un computer dice a quelle valvole quando muoversi.
Ora, i ricercatori hanno costruito un computer morbido utilizzando solo gomma e aria. "Stiamo emulando il processo di pensiero di un computer elettronico, utilizzando solo materiali morbidi e segnali pneumatici, sostituzione dell'elettronica con aria compressa, " dice Daniel J. Preston, primo autore su un articolo pubblicato in PNAS e un ricercatore post-dottorato che lavora con George Whitesides, il Professore dell'Università di Woodford L. e Ann A. Flowers.
Prendere decisioni, i computer utilizzano porte logiche digitali, circuiti elettronici che ricevono messaggi (ingressi) e determinano reazioni (uscite) in base alla loro programmazione. Il nostro circuito non è così diverso:quando un medico colpisce un tendine sotto la nostra rotula (input), il sistema nervoso è programmato per scuotere la nostra gamba (uscita).
Il computer morbido di Preston imita questo sistema utilizzando tubi in silicone e aria pressurizzata. Per ottenere i tipi minimi di porte logiche richieste per operazioni complesse, in questo caso, NON, E, e OPPURE:ha programmato le valvole morbide per reagire a diverse pressioni dell'aria. Per la porta NON logica, Per esempio, se l'ingresso è ad alta pressione, l'uscita sarà a bassa pressione. Con queste tre porte logiche, Preston dice, "potresti replicare qualsiasi comportamento riscontrato su qualsiasi computer elettronico."
Il robot galleggiante simile a un pesce nel serbatoio dell'acqua, Per esempio, utilizza un sensore di pressione ambientale (un cancello NOT modificato) per determinare quale azione intraprendere. Il robot si immerge quando il circuito rileva una bassa pressione nella parte superiore della bombola e risale quando rileva un'alta pressione in profondità. Il robot può anche emergere a comando se qualcuno preme un pulsante software esterno.
I robot costruiti solo con parti morbide hanno diversi vantaggi. In ambienti industriali, come fabbriche di automobili, enormi macchine metalliche operano con velocità e potenza cieche. Se un umano si mette in mezzo, un robot duro potrebbe causare danni irreparabili. Ma se un robot morbido urta un umano, Preston dice, "non dovresti preoccuparti di un infortunio o di un fallimento catastrofico." Possono esercitare solo tanta forza.
Ma i robot morbidi sono molto più che più sicuri:sono generalmente più economici e più semplici da realizzare, peso leggero, resistente ai danni e ai materiali corrosivi, e durevole. Aggiungi intelligenza e robot morbidi potrebbero essere utilizzati per molto di più della semplice manipolazione dei pomodori. Per esempio, un robot potrebbe rilevare la temperatura di un utente e fornire una leggera compressione per indicare la febbre, avvisare un subacqueo quando la pressione dell'acqua aumenta troppo, o spingere attraverso i detriti dopo un disastro naturale per aiutare a trovare le vittime e offrire aiuto.
I robot morbidi possono anche avventurarsi dove l'elettronica fa fatica:alti campi radiativi, come quelli prodotti dopo un malfunzionamento nucleare o nello spazio, e all'interno di macchine per la risonanza magnetica (MRI). Sulla scia di un uragano o di un'inondazione, un robot robusto e morbido potrebbe gestire terreni pericolosi e aria nociva. "Se viene investito da un'auto, continua ad andare avanti, che è qualcosa che non abbiamo con i robot duri, "dice Preston.
Preston e colleghi non sono i primi a controllare i robot senza elettronica. Altri gruppi di ricerca hanno progettato circuiti microfluidici, che può utilizzare liquido e aria per creare porte logiche non elettroniche. Un oscillatore microfluidico ha aiutato un robot morbido a forma di polpo ad agitare tutte e otto le braccia.
Ancora, i circuiti logici microfluidici si basano spesso su materiali duri come il vetro o la plastica dura, e usano canali così sottili che solo piccole quantità d'aria possono passare alla volta, rallentando il movimento del robot. In confronto, I canali di Preston sono più grandi, vicino a un millimetro di diametro, il che consente portate d'aria molto più veloci. Le sue pinze ad aria possono afferrare un oggetto in pochi secondi.
I circuiti microfluidici sono anche meno efficienti dal punto di vista energetico. Anche a riposo, i dispositivi utilizzano una resistenza pneumatica, che fa fluire l'aria dall'atmosfera a una fonte di vuoto o di pressione per mantenere la stasi. I circuiti di Preston non richiedono input di energia quando sono inattivi. Tale risparmio energetico potrebbe essere cruciale in situazioni di emergenza o di disastro in cui i robot viaggiano lontano da una fonte di energia affidabile.
I robot di gomma offrono anche una possibilità allettante:l'invisibilità. A seconda del materiale selezionato da Preston, potrebbe progettare un robot che è abbinato per indice a una sostanza specifica. Così, se sceglie un materiale che si mimetizza nell'acqua, il robot sembrerebbe trasparente quando sommerso. Nel futuro, lui e i suoi colleghi sperano di creare robot autonomi invisibili a occhio nudo o persino di rilevamento sonar. "Si tratta solo di scegliere i materiali giusti, " lui dice.
Per Preston, i materiali giusti sono gli elastomeri (o le gomme). Mentre altri campi inseguono una maggiore potenza con l'apprendimento automatico e l'intelligenza artificiale, il team di Whitesides si allontana dalla complessità crescente. "C'è un sacco di capacità lì, "Preston dice, "ma è anche bene fare un passo indietro e pensare se esiste o meno un modo più semplice di fare le cose che ti dia lo stesso risultato, soprattutto se non è solo più semplice, è anche più economico."