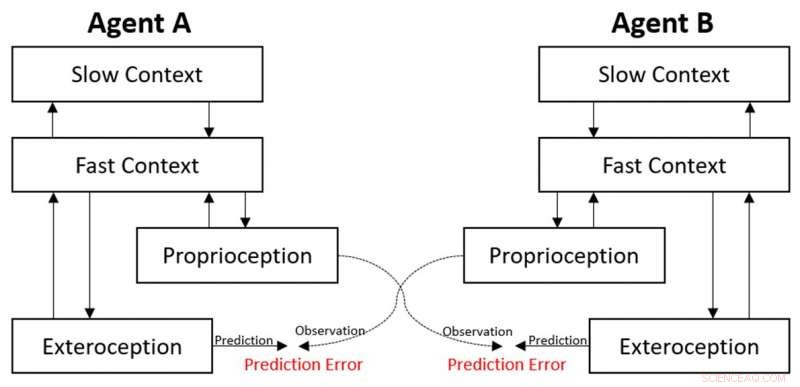
Il modello sviluppato dai ricercatori. Attestazione:Hwang, Wirkuttis &Tani.
I ricercatori dell'Okinawa Institute of Science and Technology hanno recentemente proposto un approccio neurorobotico che potrebbe aiutare lo sviluppo di robot con capacità di comunicazione avanzate. Il loro approccio, presentato in un articolo pre-pubblicato su arXiv, si basa su due caratteristiche chiave:la dinamica neurale stocastica e la minimizzazione dell'errore di previsione (PEM).
"La nostra ricerca si concentra ampiamente sulla costruzione di robot basati sui principi chiave del cervello, "Jungsik Hwang, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "In questo studio, ci siamo concentrati sul principio di minimizzazione dell'errore di previsione (PEM). L'idea principale è che il cervello sia una macchina di previsione, fare previsioni in modo coerente e ridurre al minimo l'errore di previsione quando una previsione differisce dalle osservazioni. Questa teoria è stata ampiamente applicata per spiegare molti aspetti dei comportamenti cognitivi. In questo studio, abbiamo cercato di esaminare se questo principio può essere applicato a una situazione sociale".
Negli ultimi anni, i ricercatori hanno condotto numerosi studi volti a replicare artificialmente le capacità comunicative innate di molti animali, compresi gli umani. Sebbene molti di questi studi abbiano ottenuto risultati promettenti, la maggior parte delle soluzioni esistenti non raggiunge una precisione paragonabile a quella umana.
"Uno dei compiti impegnativi per un robot con capacità di comunicazione è riconoscere l'intenzione di un altro dietro il comportamento osservato, " Hwang ha spiegato. "Un approccio comune per risolvere questo problema è considerarlo come un compito di classificazione. L'obiettivo diventa quindi ottenere l'etichetta corretta (intenzione dell'utente) con una data osservazione (comportamento dell'utente) utilizzando il classificatore. In questi giorni, la scelta popolare per tali classificatori sono i modelli di rete neurale profonda, come le reti neurali convoluzionali (CNN) e la memoria a lungo termine (LSTM)."

Attestazione:Hwang, Wirkuttis &Tani.
Nel loro studio, Hwang ei suoi colleghi hanno proposto un approccio diverso per risolvere questo problema basato su dinamiche neurali stocastiche e PEM. I ricercatori hanno applicato il loro approccio a due piccoli robot umanoidi, chiamato ROBOTIS OP2, e lo ha testato in diverse situazioni che implicavano interazioni uomo-robot e robot-robot.
"Utilizzando il nostro approccio, il robot fa costantemente previsioni sul comportamento dell'agente con cui sta interagendo, " Hwang ha detto. "Quando una previsione è diversa dalla loro osservazione, il robot aggiorna la sua convinzione in modo che possa essere effettuata la previsione corretta (ovvero minimizzando l'errore di previsione). Perciò, in questo approccio il riconoscimento dell'intenzione non è un compito di classificazione, ma un processo attivo che implica l'aggiornamento delle 'credenze' per capire cosa è successo nel recente passato. In termini di apprendimento automatico, questo può essere considerato come una sorta di apprendimento online."
Nelle valutazioni preliminari utilizzando robot umanoidi, i ricercatori hanno scoperto che essere in grado di prevedere il comportamento degli altri e ridurre al minimo l'errore di previsione ha svolto un ruolo chiave nelle situazioni sociali. Usando il loro approccio, i robot erano in grado di imitare le azioni degli agenti con cui stavano interagendo; un utente umano nelle impostazioni HRI (interazione uomo-robot) e un altro robot nelle impostazioni RRI (interazione robot-robot). Quando il loro approccio non è stato applicato ai robot, d'altra parte, le interazioni dei robot con altri agenti erano contrassegnate da schemi banali e comportamenti ripetitivi.

Attestazione:Hwang, Wirkuttis &Tani.
"Per mezzo del meccanismo PEM, il robot non solo può adattarsi rapidamente a un ambiente in evoluzione, ma anche prevedere cosa accadrà in futuro, " Ha spiegato Hwang. "Questo metodo può quindi essere applicato ad altri servizi di intelligenza ambientale in cui l'intelligenza artificiale fa costantemente previsioni sugli utenti e si adatta a loro, o addirittura fornisce in modo proattivo suggerimenti basati su osservazioni passate".
Nel futuro, l'approccio sviluppato da Hwang e dai suoi colleghi potrebbe guidare lo sviluppo di robot con migliori capacità di comunicazione. interessante, i ricercatori hanno anche osservato che quando due robot interagivano tra loro usando il loro approccio, sono emersi alcuni modelli di comunicazione nuovi e insoliti, suggerendo che il loro approccio consente un tipo di comunicazione più avanzato.
"Ci sono ancora molte direzioni di ricerca interessanti che possono essere esplorate in questo contesto, "Hwang ha detto. "Per esempio, Mi interessa avere un test di Turing gestuale in cui un utente interagisce con un robot che può essere controllato da un'altra persona dietro il muro o l'intelligenza artificiale. Se non è possibile identificare chi sta azionando il robot, possiamo dire che il robot ha l'intelligenza per interagire con le persone? Quali tipi di principi del cervello sarebbero essenziali per illustrare la somiglianza umana in tali contesti sociali? Queste sono alcune domande che mi piacerebbe esplorare in futuro".
© 2019 Scienza X Rete