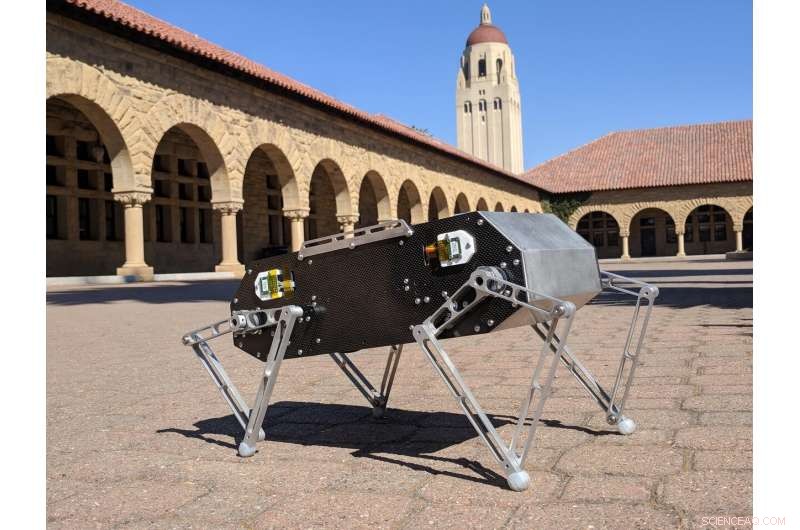
Stanford Doggo. Credito:Kau et al.
I ricercatori della Stanford University hanno recentemente creato un robot quadrupede open source chiamato Stanford Doggo. Il loro robot, presentato in un documento pre-pubblicato su arXiv e che sarà pubblicato da Esplora IEEE , supera le prestazioni di molti robot con gambe all'avanguardia nell'agilità del salto verticale.
"Circa un anno e mezzo fa, Ho fondato il sub-team di Extreme Mobility alla Stanford Student Robotics, "Nathan Kau, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Eravamo interessati a costruire robot agili in grado di esplorare ambienti in cui i veicoli a ruote o volanti non sarebbero stati efficaci. Esistono già alcuni robot davvero sorprendenti che possono funzionare in questi tipi di ambienti, ma erano piuttosto costosi, design personalizzati che non saremmo in grado di replicare. Così l'anno scorso, abbiamo deciso di progettare e prototipare un robot a quattro zampe economico ispirato a questi gruppi, e Stanford Doggo è il risultato dei nostri sforzi".
Il robot sviluppato da Kau e dai suoi colleghi ha quattro gambe, ognuno dei quali è alimentato da due motori. Le trasmissioni a cinghia collegano i motori agli assi dei collegamenti delle gambe, che fa ruotare le maglie ad un terzo della velocità dei motori. Questa riduzione della velocità quasi triplica la coppia, e il rapporto è sufficientemente basso da garantire che le forze ambientali vengano rilevate dal motore.
"Questo effetto è simile all'andare in bicicletta con una marcia bassa, ed è più facile sentire i dossi sulla strada ai piedi che a una marcia alta, " Kau ha spiegato. "Questo tipo di meccanismi, denominati attuatori ad azionamento quasi diretto, sono piuttosto comuni ora nei robot con le gambe. Però, abbiamo scoperto che pochi o nessun gruppo utilizzava questo tipo di attuatore su piccoli, robot ambulanti a basso costo."
Stanford Doggo è un robot altamente agile ed economico che può essere facilmente replicato. Sorprendentemente, il robot ha stabilito un nuovo record di agilità nel salto verticale tra qualsiasi robot o animale, raddoppiando l'altezza di salto dei precedenti robot quadrupedi. Stanford Doggo è anche molto più economico di altri robot con le gambe, che in genere costano decine o centinaia di migliaia di dollari.
"In totale, Stanford Doggo costa circa $ 3000 USD per costruire, compresi tutti i costi di produzione che dovresti sostenere se non hai macchine utensili costose come frese o torni, " ha detto Kau. "Il basso costo significa che il robot è più accessibile agli altri, soprattutto se non sono in un laboratorio universitario. La sua caratteristica più importante, però, è che funziona su hardware e software open source e che abbiamo rilasciato piani dettagliati, elenchi di parti e istruzioni."
In una serie di valutazioni effettuate da Kau e dai suoi colleghi, Stanford ha superato gli altri robot quadrupedi con un margine significativo. La sua agilità di salto verticale, una misura della velocità verticale media, ha eguagliato quello dell'animale più agile e ha superato quello del robot con le gambe più performanti del 22%. Diversi altri robot interessanti sono attualmente in fase di sviluppo, così presto i titoli di Stanford Doggo potrebbero cambiare. Ciò nonostante, la sua agilità di salto verticale rimane altamente notevole.
"Speriamo che sempre più laboratori siano in grado di testare nuove tecniche di controllo utilizzando il nostro robot come piattaforma, " ha detto Kau. "Pensiamo che se più persone stanno lavorando su questi tipi di robot, saranno pronti più rapidamente per applicazioni del mondo reale come la consegna di forniture critiche o ricerca e soccorso. Speriamo anche che il nostro robot ispiri gli studenti a iniziare a esplorare il campo della robotica con le gambe. In genere è un'area costosa della robotica in cui lavorare, quindi speriamo che Stanford Doggo abbassi la barriera all'ingresso".
Kau e i suoi colleghi sono riusciti a sviluppare il primissimo robot quadrupede economico e altamente agile progettato per applicazioni di ricerca. Stanford Doggo è interamente open-source ed è costruito utilizzando pochissime parti personalizzate, quindi può essere facilmente ricreato. I ricercatori sperano che altri team di robotica costruiranno e miglioreranno il loro robot, progredire ulteriormente nella loro ricerca.
Kau e i suoi colleghi stanno anche lavorando a una versione più grande di Stanford Doggo, chiamato Stanford Woofer. Stanford Woofer è circa il doppio di Doggo e può trasportare circa 6 kg di attrezzatura aggiuntiva, come sensori e un braccio robotico.
"Stanford Doggo è ancora un progetto in corso, " aggiunse Kau. "Per esempio, stiamo lavorando per incorporare una suite completa di sensori nel robot, incluso LIDAR. Un altro sottoprogetto è rendere il robot un po' meno spoglio e più accessibile, soprattutto perché pensiamo che questa potrebbe essere una piattaforma efficace per l'istruzione e la divulgazione. Stiamo anche scrivendo un Instructable completo per integrare i nostri materiali open source esistenti, che fornisce istruzioni passo passo su come costruire il tuo Stanford Doggo."
© 2019 Scienza X Rete