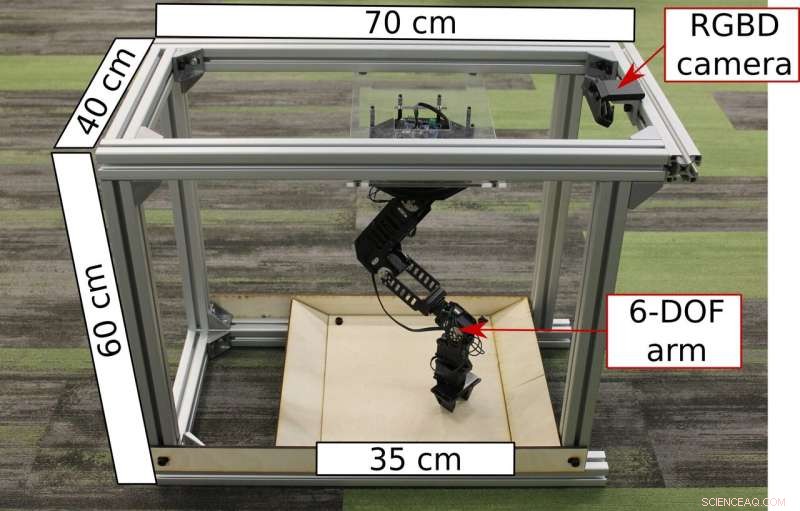
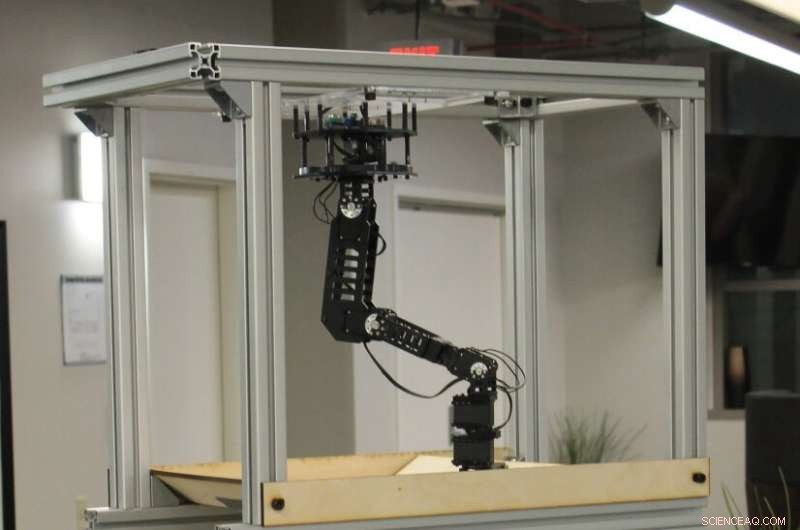
Primo piano di una cella REPLAB con annotazioni. Credito:Yang et al.
I ricercatori della UC Berkeley hanno sviluppato un riproducibile, piattaforma di benchmark compatta e a basso costo per valutare approcci di apprendimento robotico, che chiamavano REPLAB. Il loro recente studio, presentato in un articolo pre-pubblicato su arXiv, è stato supportato da Berkeley DeepDrive, l'Ufficio di Ricerca Navale (ONR), Google, NVIDIA e Amazon.
"Di recente gli approcci basati sull'apprendimento automatico hanno iniziato a diventare popolari nella robotica, ma attualmente non esiste un modo semplice per confrontare gli approcci a causa delle principali differenze nelle configurazioni hardware utilizzate nei vari laboratori, "Brian Yang, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Per esempio, nell'afferrare la ricerca, tutto, dal tipo di braccio o pinza fino al materiale di cui è fatta la pinza, influisce sulle prestazioni di presa, quindi, anche se ottieni una migliore precisione di presa rispetto a un metodo dell'anno scorso, non è chiaro se ciò sia dovuto a un migliore controllo o semplicemente a un hardware migliore".
Negli ultimi anni, c'è stata una crescente necessità di misure standardizzate e piattaforme di riferimento per valutare gli approcci di apprendimento automatico per la robotica. Stabilire parametri di riferimento efficaci a volte può essere difficile, in particolare per l'apprendimento della robotica, dove ci si aspetta che i robot generalizzino i modelli appresi a nuovi oggetti e situazioni. La nuova piattaforma di benchmark sviluppata presso l'UC Berkeley fornisce una soluzione a basso costo e facilmente riproducibile per testare approcci di manipolazione di oggetti robotici.
"Altre applicazioni dell'apprendimento automatico come la visione artificiale e l'elaborazione del linguaggio naturale hanno tratto grandi benefici dall'avere set di dati e benchmark, poiché guidano la ricerca a concentrarsi su problemi importanti, fornire un modo per tracciare i progressi di una comunità di ricerca, e aiutano a identificare rapidamente, diffondere, e migliorare le idee che funzionano bene, " Dinesh Jayaraman, un altro ricercatore coinvolto nello studio, ha detto a TechXplore. "Abbiamo progettato REPLAB per svolgere questa funzione per la comunità di ricerca sull'apprendimento dei robot".
Due celle REPLAB impilate l'una sull'altra. Credito:Yang et al.
REPLAB ha diversi componenti, compreso un braccio robotico, una fotocamera e uno spazio di lavoro, posto in uno spazio cuboide di 70 x 40 x 60 cm. La piattaforma costa circa $ 2000 per la costruzione e può essere assemblata in poche ore. Il suo design compatto e a basso costo potrebbe consentire a più ricercatori, anche chi ha un budget limitato, per valutare i loro quadri e approcci.
"REPLAB è una piattaforma hardware completamente standardizzata per la manipolazione robotica progettata pensando a una facile adozione, " ha spiegato Jayaraman. "Contiene un singolo braccio a basso costo (Trossen WidowX), una telecamera RGB-D (Intel Realsense SR300) e una standardizzata, spazio di lavoro compatto che è facile da montare in poche ore utilizzando le nostre istruzioni di montaggio. Tutti messi insieme, un'intera cella REPLAB costa circa 2k USD (rispetto alle configurazioni del braccio standard che costano 40-50k), occupando circa 10 volte meno spazio rispetto a una configurazione standard del braccio."
Oltre alla piattaforma stessa, i ricercatori hanno proposto un modello per un benchmark di comprensione che include una definizione del compito e un protocollo di valutazione, misure di performance e un set di dati di 92, 000 tentativi di presa. Le linee di base per questo benchmark sono state stabilite tramite l'attuazione, valutazione e analisi di diversi approcci di presa esistenti.
"Poiché abbiamo questa piattaforma hardware standardizzata, siamo anche in grado di condividere un pacchetto software open-source con implementazioni di vari algoritmi di apprendimento robot (finora, algoritmi di apprendimento supervisionato per la comprensione e algoritmi di apprendimento per rinforzo per il raggiungimento di punti 3D), " disse Jayamaran. "Se costruisci una tua cella REPLAB, puoi scaricare un'immagine Docker contenente queste implementazioni ed eseguirle immediatamente sul tuo cellulare."
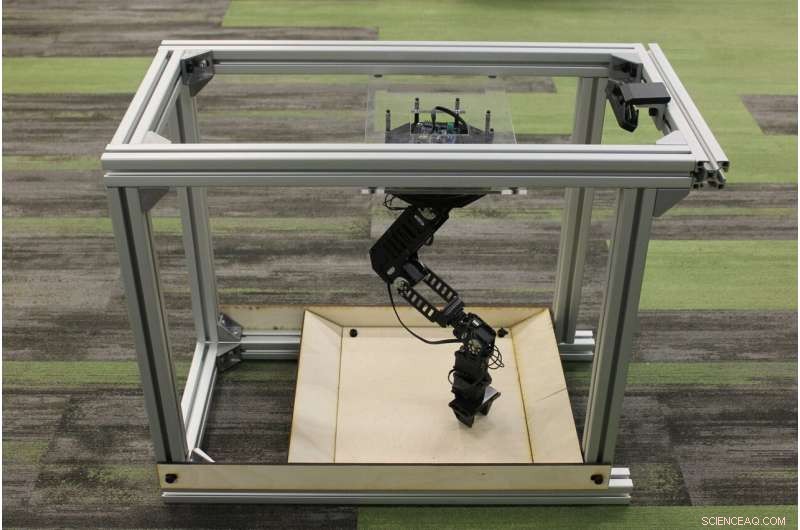
Una cella REPLAB senza annotazioni. Credito:Yang et al.
Finora, i ricercatori hanno principalmente svolto valutazioni volte a verificare la fattibilità di REPLAB come piattaforma per la ricerca riproducibile nell'apprendimento della robotica, concentrandosi su due compiti particolari:afferrare e raggiungere il punto 3-D. In altre parole, hanno usato la loro piattaforma per implementare e valutare molteplici approcci di apprendimento supervisionato profondo per questi particolari compiti di presa. I loro risultati suggeriscono che la piattaforma espone gli algoritmi esistenti a sfide in qualche modo poco studiate che sono cruciali per lo sviluppo di robot che funzionano bene in natura, come l'azionamento rumoroso.
"Abbiamo anche verificato che i risultati rimangono coerenti su più celle REPLAB, che è importante per pensare alle implementazioni e alle valutazioni di algoritmi basati su REPLAB come riproducibili, " ha detto Jayamaran. "Riteniamo che REPLAB faciliterà metriche di progresso coerenti e riproducibili per l'apprendimento dei robot, abbassare la barriera all'ingresso nella robotica per i ricercatori in discipline correlate come l'apprendimento automatico, e incoraggiare il codice e i dati condivisibili tra i ricercatori".
La nuova piattaforma introdotta da Yang, Jayaraman e i loro colleghi potrebbero presto consentire a più ricercatori di valutare approcci per un'ampia gamma di compiti di manipolazione. Come altre piattaforme benchmank, però, per riuscire, l'uso di REPLAB dovrebbe coinvolgere la comunità di ricerca sull'apprendimento dei robot in generale.
"Mentre siamo investiti nel mantenimento della piattaforma per molti anni a venire, stiamo invitando contributi dalla comunità, come nuove implementazioni di algoritmi, set di dati, e benchmark e alla nostra piattaforma open source, "Ha detto Jayaraman. "La grande visione è raggiungere un punto in cui se viene rilasciato un nuovo algoritmo di apprendimento robot all'avanguardia, un ricercatore seduto in qualsiasi parte del mondo sarebbe in grado di scaricare, valutare, iterare e migliorare un'implementazione in pochi giorni. Pensiamo che REPLAB aiuti ad accelerare la ricerca facendo due cose:abbassando la barriera di ingresso e consentendo a molte più persone di partecipare a ricerche all'avanguardia, e consentendo questo tipo di iterazione e miglioramento rapidi attraverso la condivisione del codice."
Nel loro lavoro futuro, i ricercatori della UC Berkeley hanno in programma di sviluppare ulteriormente la loro piattaforma, aggiungendo un simulatore di cella REPLAB completo e algoritmi per un controllo affidabile, affrontando anche nuove sfide di manipolazione. Sperano anche di ampliare il repository github ufficiale REPLAB e l'immagine docker, comprese le implementazioni di algoritmi più avanzati.
© 2019 Scienza X Rete