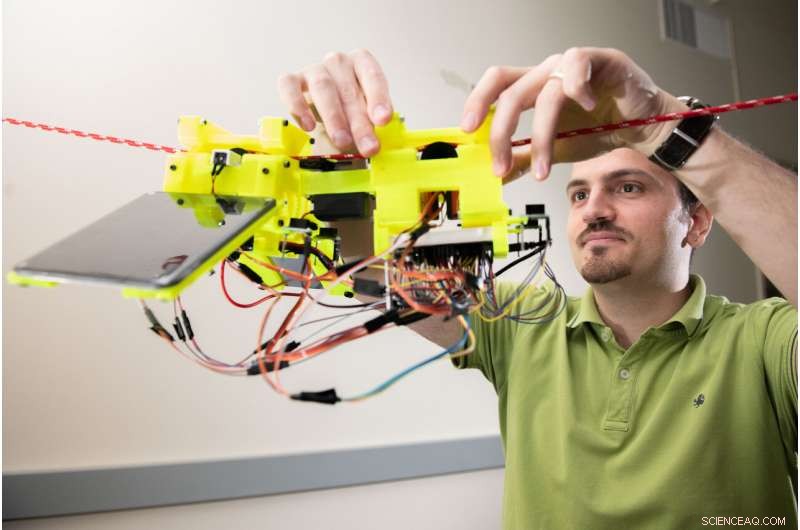
L'assistente di ricerca laureato Gennaro Notomista mostra i componenti di SlothBot su un cavo in un laboratorio della Georgia Tech. Il robot è progettato per essere lento ed efficiente dal punto di vista energetico per applicazioni come il monitoraggio ambientale. Credito:Allison Carter, Georgia Tech
Per il monitoraggio ambientale, agricoltura di precisione, manutenzione dell'infrastruttura e alcune applicazioni di sicurezza, lento ed efficiente dal punto di vista energetico può essere meglio che veloce e ha sempre bisogno di una ricarica. È qui che entra in gioco "SlothBot".
Alimentato da una coppia di pannelli fotovoltaici e progettato per indugiare nella chioma della foresta ininterrottamente per mesi, SlothBot si muove solo quando deve misurare i cambiamenti ambientali, come fattori meteorologici e chimici nell'ambiente, che possono essere osservati solo con una presenza a lungo termine. Il robot iper-efficiente proof-of-concept, descritto il 21 maggio alla Conferenza Internazionale sulla Robotica e l'Automazione (ICRA) a Montreal, potrebbe presto essere appeso tra i cavi delle cime degli alberi nell'Atlanta Botanical Garden.
"Nella robotica, sembra che stiamo sempre spingendo per essere più veloci, robot più agili e più estremi, " disse Magnus Egerstedt, la Steve W. Chaddick School Chair della School of Electrical and Computer Engineering presso il Georgia Institute of Technology e investigatore principale per Slothbot. "Ma ci sono molte applicazioni in cui non è necessario essere veloci. Devi solo essere costantemente presente per lunghi periodi di tempo, osservando cosa sta succedendo».
Sulla base di quella che Egerstedt chiamava la "teoria della lentezza, " Il Graduate Research Assistant Gennaro Notomista ha progettato SlothBot insieme al suo collega, Youssef Emam, utilizzando parti stampate in 3D per gli ingranaggi e i meccanismi di commutazione dei cavi necessari per strisciare attraverso una rete di cavi negli alberi. La sfida più grande per un robot strisciante è passare da un cavo all'altro senza cadere, disse Notomista.
"La sfida consiste nell'aggrapparsi dolcemente a un filo mentre ne afferra un altro, " ha detto. "È una manovra complicata e devi farlo bene per fornire una transizione sicura. Assicurarsi che gli switch funzionino bene per lunghi periodi di tempo è davvero la sfida più grande".
Meccanicamente, SlothBot è costituito da due corpi collegati da una cerniera azionata. Ogni scocca ospita un motore di azionamento collegato ad un cerchio su cui è montato un pneumatico. L'uso delle ruote per la locomozione è semplice, efficiente dal punto di vista energetico e più sicuro di altri tipi di locomozione a filo, dicono i ricercatori.
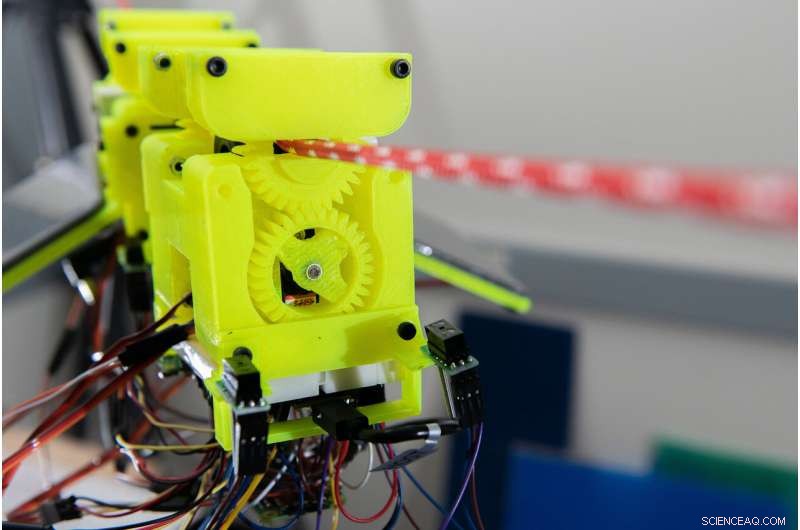
L'immagine mostra i componenti di SlothBot, che è alimentato da due pannelli fotovoltaici. Gli ingranaggi e gli interruttori stampati in 3D aiutano il robot a passare da un cavo all'altro. Credito:Allison Carter, Georgia Tech
SlothBot ha finora operato in una rete di cavi nel campus della Georgia Tech. Prossimo, un nuovo guscio stampato in 3D, che fa sembrare il robot più simile a un bradipo, proteggerà i motori, ingranaggi, attuatori, macchine fotografiche, computer e altri componenti dalla pioggia e dal vento. Ciò porrà le basi per studi a lungo termine sulla chioma degli alberi dell'Atlanta Botanical Garden, dove Egerstedt spera che i visitatori vedranno le condizioni di monitoraggio di SlothBot già questo autunno.
Il nome SlothBot non è una coincidenza. I bradipi della vita reale sono piccoli mammiferi che vivono nei baldacchini della giungla del Sud e Centro America. Guadagnarsi da vivere mangiando le foglie degli alberi, gli animali possono sopravvivere con l'equivalente calorico giornaliero di una piccola patata. Con il loro metabolismo lento, i bradipi riposano anche 22 ore al giorno e raramente scendono dagli alberi dove possono trascorrere l'intera vita.
"La vita di un bradipo è piuttosto lenta e non c'è molta eccitazione a livello quotidiano, " ha detto Jonathan Pauli, professore associato presso il Dipartimento di ecologia della foresta e della fauna selvatica presso l'Università del Wisconsin-Madison, che si è consultato con il team Georgia Tech sul progetto. "La cosa bella di una storia di vita molto lenta è che non hai davvero bisogno di molto input energetico. Puoi avere una lunga durata e persistenza in un'area limitata con pochissimi input di energia per un lungo periodo di tempo".
Questo è esattamente ciò che i ricercatori si aspettano da SlothBot, il cui sviluppo è stato finanziato dall'U.S. Office of Naval Research.
"Ci sono molte cose che non sappiamo su ciò che accade effettivamente sotto fitte aree alberate, " Ha detto Egerstedt. "La maggior parte delle volte SlothBot starà semplicemente lì fuori, e di tanto in tanto si sposterà in un luogo soleggiato per ricaricare la batteria."
I ricercatori sperano anche di testare SlothBot in una piantagione di cacao in Costa Rica che ospita già veri bradipi. "I cavi usati per spostare il cacao sono diventati una superstrada per i bradipi perché gli animali li trovano utili per muoversi, " Egerstedt ha detto. "Se tutto va bene, dispiegheremo SlothBots lungo i cavi per monitorare i bradipi."

Jonathan Pauli osserva un bradipo con due dita che si muove lungo un cavo in una piantagione di cacao nel nord-est del Costa Rica. Pauli ha collaborato con M. Zachariah Peery per studiare i bradipi degli alberi sul campo per un decennio. Credito:M. Zachariah Peery
Egerstedt è noto per gli algoritmi che guidano sciami di piccoli robot su ruote o volanti. Ma durante una visita in Costa Rica, si interessò ai bradipi e iniziò a sviluppare quella che chiama "una teoria della lentezza" insieme al professor Ron Arkin alla School of Interactive Computing della Georgia Tech. La teoria sfrutta i vantaggi dell'efficienza energetica.
"Se stai facendo cose come il monitoraggio ambientale, vuoi stare nella foresta per mesi, " Ha detto Egerstedt. "Questo cambia il modo in cui si pensa ai sistemi di controllo ad alto livello".
I robot volanti sono già utilizzati per il monitoraggio ambientale, ma il loro elevato fabbisogno energetico significa che non possono indugiare a lungo. I robot su ruote possono cavarsela con meno energia, ma possono rimanere bloccati nel fango o essere ostacolati dalle radici degli alberi, e non è possibile ottenere una visione d'insieme da terra.
"La cosa che costa energia più di ogni altra cosa è il movimento, " Ha detto Egerstedt. "Traslocare è molto più costoso che sentire o pensare. Per i robot ambientali, dovresti muoverti solo quando è assolutamente necessario. Dovevamo pensare a come sarebbe stato".
Per Pauli, che studia una varietà di fauna selvatica, lavorare con Egerstedt per aiutare SlothBot a prendere vita è stato gratificante.
"È bello vedere un robot ispirato alla biologia dei bradipi, " ha detto. "È stato divertente condividere come i bradipi e altri organismi che vivono in questi ecosistemi per lunghi periodi di tempo vivono le loro vite. Sarà interessante vedere i robot rispecchiare ciò che vediamo nelle comunità ecologiche naturali".














