Bene, ognuno a suo gusto. I gattini che fanno amicizia con gomitoli di lana sono magneti assoluti per i video surfisti, ma un esercito rivale di video clickster non può mai massimizzare lo sguardo fissando umanoidi che navigano dove vogliono andare.
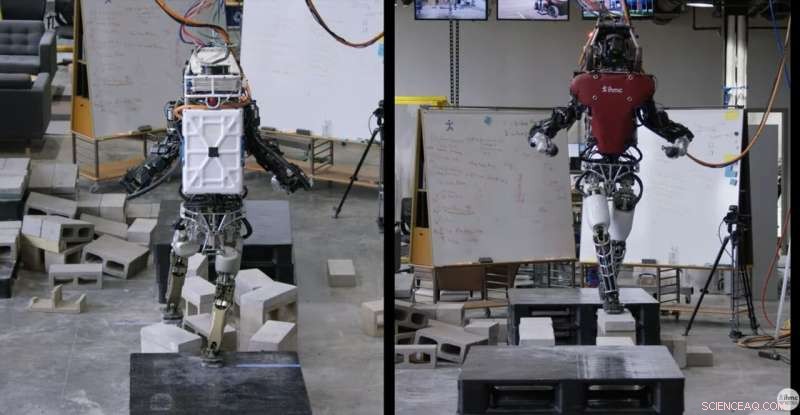
L'ultimo video che mostra robot umanoidi in movimento sta impressionando gli spettatori con il modo abile e di successo con cui si muovono in un labirinto di blocchi di cemento.
Il video su quest'ultimo è IHMC, l'Istituto per la cognizione umana e meccanica (IHMC).
"Per camminare in un ambiente disordinato e complicato, " ha detto la squadra, i robot con le gambe devono capire dove possono mettere i piedi. Sfida aggiunta:questo deve essere fatto rapidamente, se il terreno è pianeggiante o complesso.
Il programma di pianificazione del passo autonomo di IHMC è al lavoro sia sul robot di Boston Dynamics, e Valkyrie sviluppato dalla NASA.
Il team ha utilizzato i due robot, l'Atlas (Boston Dynamics) e il Valkyrie (NASA Johnson Space Center) per la più recente vetrina. Un'altra caratteristica fondamentale era la sua "testa".
"Il metodo utilizza i sensori delle macchine per elaborare il percorso più efficiente verso una posizione selezionata dall'uomo, " disse TNW.
"In questo video, " disse il narratore, "usiamo la testa Carnegie Robotics MultiSense SL per generare la nuvola di punti dell'ambiente. Segmentando questa nuvola di punti in regioni planari, rappresentiamo l'enorme quantità di dati provenienti dai sensori di percezione in una forma molto più compatta."
Hanno ulteriormente scomposto queste regioni planari in una raccolta di poligoni. Engadget :"Ogni sezione viene poi interpretata in una serie di poligoni per creare un modello dell'ambiente, in modo che il robot possa pianificare ciascuno dei suoi passaggi per arrivare dal punto di partenza al suo obiettivo."
Il team IHMC, durante la sfida DARPA, aveva precedentemente utilizzato il robot Atlas. Un operatore ha diretto Atlas. I passi sono stati inseriti nell'interfaccia. Il processo era lento e gravava sull'operatore. Un altro aspetto negativo era che il loro posizionamento di passi individuali era soggetto a errori. Atlas è caduto il primo giorno della competizione finale.
Questa volta, per aggirare l'errore umano, il nuovo sistema consente a un operatore di selezionare la posizione desiderata, disse TNW , "ma alla fine si basa su un algoritmo per capire come portare il robot lì ed evitare gli ostacoli".
"Fondamentalmente, IHMC gestisce queste complesse operazioni di navigazione specificando un punto di inizio e di fine per il robot, " ha detto Darrell Etherington in TechCrunch , "e quindi mappare tutti i possibili percorsi passo dopo passo, valutare il costo di ciascuno e alla fine arrivare al miglior percorso possibile, il che può avvenire in tempi relativamente brevi sull'hardware moderno."
In una scena video di test mostra il team che fa camminare il robot su una serie di blocchi di calcestruzzo, dove ci sono solo pochi appigli possibili. Possono anche pianificare percorsi in cui il robot non ha altra scelta che utilizzare solo appigli parziali.
Attualmente, hanno detto nelle loro note video, il terreno stretto ha una percentuale di successo di circa il 50 percento, terreno accidentato è di circa il 90 per cento, mentre il terreno pianeggiante è vicino al 100%.
Pittsburgh, Carnegie Robotics con sede in Pennsylvania, nel frattempo, è un fornitore di sensori e piattaforme di robotica avanzata. Il MultiSense SL originale era stato il sensore preferito dai robot umanoidi Atlas nella DARPA Robotics Challenge (DRC). Come la testa umanoide, la SL ha fornito la maggior parte dei dati percettivi utilizzati per la teleoperazione e il controllo automatizzato.
Qual è il prossimo?
"Abbiamo in programma di aumentare la velocità del pianificatore e la capacità di pianificare attraverso labirinti e obiettivi invisibili, " hanno detto nelle note video.
E' chiaro che la squadra sta continuando i tentativi di conquistare la camminata bipede.
Lo ha affermato il team di IHMC.
"I nostri progetti umanoidi sono focalizzati sullo spingere le nostre capacità umanoidi bipedi in avanti per gestire terreni accidentati senza alcuna conoscenza dell'ambiente dai sensori di bordo...Ci stiamo anche concentrando sulla capacità di gestire in modo robusto i disturbi esterni. Il nostro obiettivo è affrontare sempre più difficili sfide a piedi."
Il video e il documento sono stati presentati all'evento Humanoids 2019 - International Conference on Humanoid Robots che si terrà entro la fine dell'anno.
© 2019 Science X Network