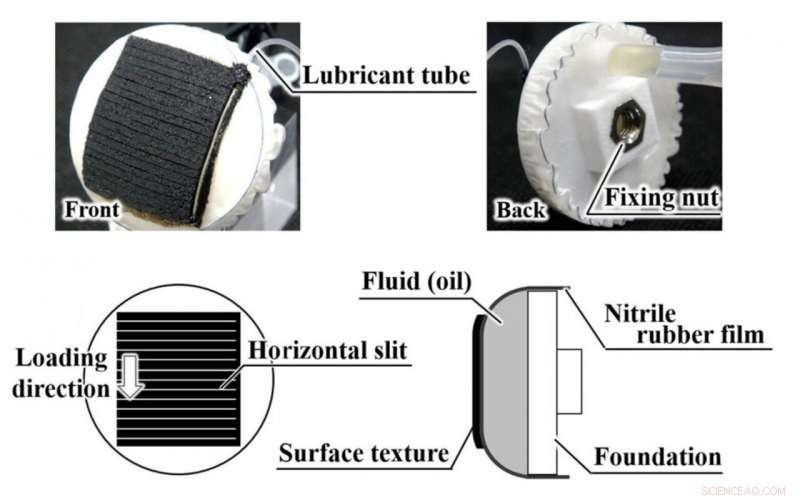
Questo è un polpastrello fluido con una trama superficiale incollata. Credito:Università di Kanazawa
I robot industriali sono ora ampiamente utilizzati e sono indispensabili nella produzione di automobili e in altri campi. Le mani robot convenzionali sono adatte per afferrare oggetti duri di forma fissa, mentre non è facile afferrare oggetti complicati o afferrare delicatamente oggetti morbidi. È inoltre necessario, in varie condizioni, rispondere alle caratteristiche fisiche degli oggetti quali le caratteristiche della superficie:asciutto, bagnato, eccetera.
La punta delle dita di una mano robotica dalla superficie morbida è deformabile e può afferrare piuttosto facilmente un oggetto di forma complicata, poiché l'area di contatto può essere allargata dalla deformazione superficiale in risposta alla forma dell'oggetto. I polpastrelli con superficie morbida sono molto efficaci nell'afferrare oggetti morbidi; anche il tofu può essere afferrato. In genere, però, l'attrito superficiale del materiale morbido è elevato, che rende più difficile il rilascio. È anche difficile rilasciare gli oggetti nelle posizioni desiderate, soprattutto nei casi in cui lo spazio di lavoro è ristretto.
Un gruppo guidato dal Prof. Tetsuyou Watanabe dell'Università di Kanazawa ha condotto ricerche sulla tecnologia di controllo per afferrare oggetti con la punta delle dita delle mani dei robot. In questo studio, il gruppo mirava a sviluppare un sistema di controllo dell'attrito. Il gruppo ha utilizzato i polpastrelli morbidi di una mano robotica per afferrare gli oggetti; il rilascio è stato ottenuto applicando (iniettando) un lubrificante. In questo studio, etanolo assoluto (> 99,5%) è stato impiegato come lubrificante, poiché l'etanolo è chimicamente sicuro e facile da asciugare, e poiché la sua tensione superficiale è bassa.
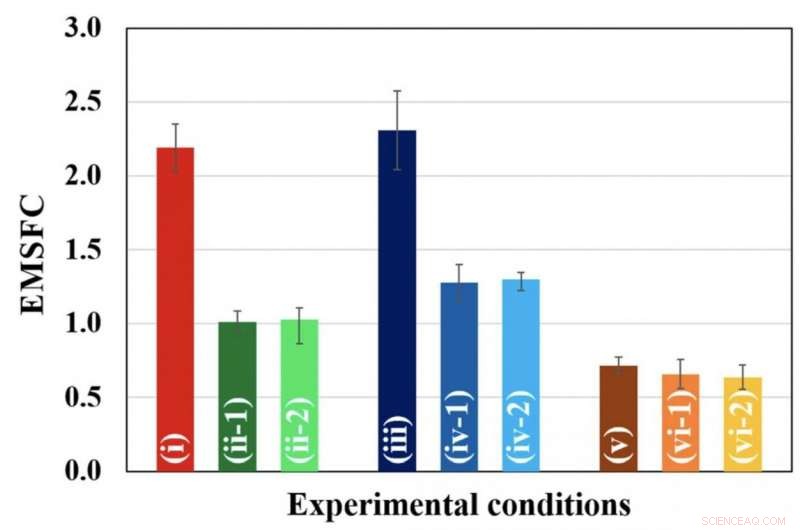
EMSFC in varie condizioni sperimentali. Il materiale di destinazione era il polipropilene. Un oggetto in polipropilene è stato afferrato con i polpastrelli fluidi mostrati nella Figura 1, e il coefficiente di attrito statico massimo equivalente (EMSFC)*2) è stato misurato per rivelare l'effetto del lubrificante. (i) secco:(ii-1) secco, lubrificante iniettato prima della presa:(ii-2) asciutto, lubrificante iniettato dopo la presa:(iii) bagnato con acqua:(iv-1) bagnato con acqua, lubrificante iniettato prima della presa:(iv-2) bagnato con acqua, lubrificante iniettato dopo la presa:(v) oleoso con olio per motosega:(vi-1) oleoso con olio per motosega, lubrificante iniettato prima della presa:(vi-2) oleoso con olio per motosega, lubrificante iniettato dopo la presa. L'effetto del lubrificante, etanolo assoluto, è stato verificato sia in condizioni asciutte che umide. Credito:Università di Kanazawa
Come si vede in Figura 1, una pellicola di gomma nitrilica è stata incollata ai lati della base del polpastrello per creare uno spazio per il riempimento con olio per motosega per creare una "punta delle dita fluida". Quindi una "texture" di silicone è stata incollata per rivestire la pellicola di gomma; il materiale della "texture" era un sigillante siliconico con fessure, il cui intervallo era di 1,5 mm, perpendicolare alla direzione del carico. Le fessure sono state introdotte per un maggiore attrito in condizioni di bagnato e per la diffusione del lubrificante. Con questo dito fluido, sono stati afferrati oggetti di vario materiale utilizzati per gli utensili da cucina ed è stato accertato che, dopo aver applicato il lubrificante, l'attrito è stato infatti ridotto (Figura 2). L'attrito è stato ridotto sia in condizioni asciutte che bagnate, mentre un tale effetto lubrificante non è stato osservato in una condizione oleosa.
Prossimo, è stata eseguita una simulazione dell'attività di confezionamento della scatola come mostrato nella Figura 3. Una scatola di carta è stata afferrata con due dita fluide da entrambi i lati. La "trama" sopra descritta è stata incollata a ciascun polpastrello fluido. La presa stabile è stata confermata mettendo un peso sulla scatola di carta. Dopo aver tolto il peso, lubrificante è stato iniettato su entrambi i polpastrelli fluidi, che ha causato uno scivolamento verso il basso della scatola di carta in un tempo piuttosto breve (meno di 2,5 s), in modo che l'attività di confezionamento della scatola di carta fosse completata (Figura 3). Come mostrato qui, una "texture" ad alto attrito era legata al polpastrello fluido, e iniettando un lubrificante (qui, etanolo assoluto) ha ridotto l'attrito. Così, il rilascio e il posizionamento di un oggetto in una posizione desiderata è stato ottenuto controllando l'attrito senza muovere la punta delle dita.
In questo studio, è stato verificato che la presa dell'oggetto da parte di polpastrelli fluidi a superficie morbida con elevato attrito era controllabile mediante l'applicazione di un lubrificante adatto. È, però, necessario fare più esperimenti in varie condizioni per applicare l'attuale tecnologia di controllo agli ambienti di produzione. Ciò nonostante, questo studio dovrebbe essere un passo avanti per realizzare l'automazione del lavoro di, Per esempio, afferrare e rilasciare oggetti in uno spazio ristretto.
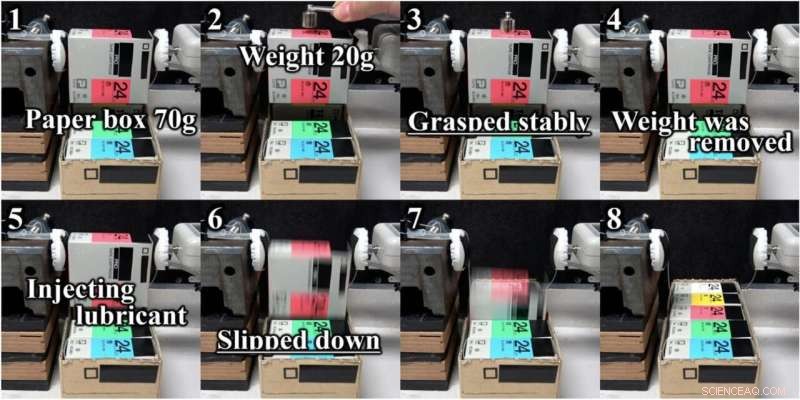
Questa è una simulazione di attività di imballaggio di scatole di carta. (1) Una scatola di carta (70 g) è stata afferrata da due dita fluide dai lati sinistro e destro, (2) Posizionando un peso di 20 g sulla scatola di carta, (3) Confermando la presa stabile, (4) Rimozione del peso, (5) Iniezione di lubrificante, (6) La scatola di carta che scivola verso il basso, (7) La scatola di carta che scivola nel minuscolo, (8) Completamento dell'imballaggio della scatola di carta. Credito:Università di Kanazawa