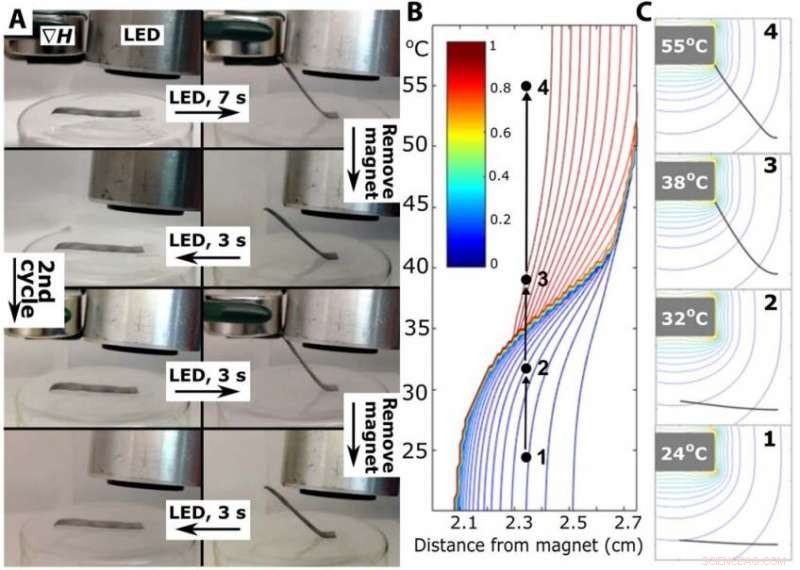
Cantilever a memoria di forma contenente particelle magnetiche incatenate. (A) Attuazione e (B e C) simulazioni di un film a sbalzo DiAPLEX contenente particelle magnetiche incatenate. Il magnete permanente (∇H) e il LED sono indicati nel pannello in alto a sinistra. (B) I contorni mostrano il grado di attuazione (0, piatto; 1, contatto magnetico) di un filamento simulato attraverso una gamma di posizioni e temperature. (C) I fermi immagine simulati corrispondono a punti discreti lungo il percorso indicato in (B), a una distanza di 2,3 cm dal magnete, che è coerente con la geometria sperimentale a sinistra. Guarda i filmati S1 e S2 per esperimenti e simulazioni del cantilever. Credito:Jessica A.-C. Liu, Università statale della Carolina del Nord.
I ricercatori della North Carolina State University e della Elon University hanno sviluppato una tecnica che consente loro di controllare a distanza il movimento di robot morbidi, bloccarli in posizione per tutto il tempo necessario e successivamente riconfigurare i robot in nuove forme. La tecnica si basa su campi luminosi e magnetici.
"Siamo particolarmente entusiasti della riconfigurabilità, "dice Joe Tracy, un professore di scienza e ingegneria dei materiali presso la NC State e corrispondente autore di un documento sul lavoro. "Ingegnerizzando le proprietà del materiale, possiamo controllare a distanza il movimento del robot morbido; possiamo fargli mantenere una data forma; possiamo quindi riportare il robot alla sua forma originale o modificarne ulteriormente il movimento; e possiamo farlo ripetutamente. Tutte queste cose sono preziose, in termini di utilità di questa tecnologia nelle applicazioni biomediche o aerospaziali".
Per questo lavoro, i ricercatori hanno utilizzato robot morbidi realizzati con un polimero incorporato con microparticelle di ferro magnetiche. In condizioni normali, il materiale è relativamente rigido e mantiene la sua forma. Però, i ricercatori possono riscaldare il materiale usando la luce di un diodo a emissione di luce (LED), che rende il polimero flessibile. Una volta flessibile, i ricercatori hanno dimostrato di poter controllare a distanza la forma del robot applicando un campo magnetico. Dopo aver formato la forma desiderata, i ricercatori potrebbero rimuovere la luce LED, consentendo al robot di riprendere la sua rigidità originale, bloccando efficacemente la forma in posizione.
Applicando la luce una seconda volta e rimuovendo il campo magnetico, i ricercatori potrebbero far tornare i robot morbidi alle loro forme originali. Oppure potrebbero applicare di nuovo la luce e manipolare il campo magnetico per spostare i robot o fargli assumere nuove forme.
Nelle prove sperimentali, i ricercatori hanno dimostrato che i robot morbidi potrebbero essere utilizzati per formare "afferratori" per sollevare e trasportare oggetti. I robot morbidi potrebbero essere utilizzati anche come cantilever, o piegato in "fiori" con petali che si piegano in direzioni diverse.
"Non ci limitiamo alle configurazioni binarie, come un grabber che è aperto o chiuso, "dice Jessica Liu, primo autore dell'articolo e un dottorato di ricerca. studente presso NC State. "Possiamo controllare la luce per garantire che un robot mantenga la sua forma in qualsiasi momento".
Inoltre, i ricercatori hanno sviluppato un modello computazionale che può essere utilizzato per semplificare il processo di progettazione del robot morbido. Il modello consente loro di mettere a punto la forma di un robot, spessore del polimero, l'abbondanza di microparticelle di ferro nel polimero, e la dimensione e la direzione del campo magnetico richiesto prima di costruire un prototipo per svolgere un compito specifico.
"I prossimi passi includono l'ottimizzazione del polimero per diverse applicazioni, " Dice Tracy. "Per esempio, tecnopolimeri che rispondono a diverse temperature per soddisfare le esigenze di applicazioni specifiche."
La carta, "Riconfigurazione a controllo fototermico e magnetico di compositi polimerici per robotica morbida, " appare sul giornale Progressi scientifici . La prima autrice dell'articolo è Jessica Liu, un dottorato di ricerca studente presso NC State. Il documento è stato co-autore di Jonathan Gillen, un ex studente universitario alla NC State; Sumeet Mishra, un ex dottorato di ricerca studente presso NC State; e Benjamin Evans, professore associato di fisica alla Elon University.