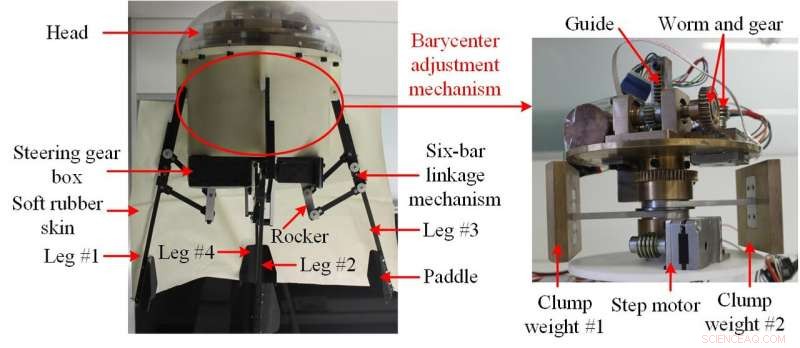
La progettazione meccanica della medusa robotica. Credito:©Science China Press
Come fonte di ispirazione, creature acquatiche come pesci, cetacei, e le meduse potrebbero ispirare progetti innovativi per migliorare i modi in cui i sistemi artificiali operano e interagiscono con gli ambienti acquatici. Le meduse in natura si spingono attraverso l'ambiente circostante espandendo e contraendo radialmente i loro corpi a forma di campana per spingere l'acqua dietro di loro, che si chiama propulsione a getto.
Contrariamente all'opinione prevalente secondo cui le meduse sono descritte come nuotatrici inefficienti, le meduse hanno dimostrato di essere uno dei nuotatori più efficienti dal punto di vista energetico. Questo è, è stato dimostrato che il nuoto da medusa avrà un notevole vantaggio propulsivo se è richiesta una propulsione a bassa energia. Perciò, i movimenti delle meduse hanno suscitato un notevole interesse nell'ultimo decennio nel contesto dei veicoli sottomarini bioispirati.
Recentemente, ricercatori dell'Istituto di automazione, Accademia Cinese delle Scienze di Pechino, La Cina ha sviluppato con successo una nuova medusa robotica in grado di eseguire propulsioni e manovre tridimensionali simili a meduse basate su un metodo basato sull'apprendimento di rinforzo.
Combinando gli ultimi progressi nella progettazione meccatronica, materiali, elettronica, e metodi di controllo, i ricercatori stanno facendo uno sforzo integrato per sviluppare attuatori intelligenti per fabbricare varie meduse robotiche. Generalmente, tali meduse robotiche sono spesso legate e molto più lente in velocità rispetto a quelle azionate dai motori elettrici convenzionali. La maggior parte delle meduse robotiche esistenti non può regolare liberamente il proprio assetto a tre assi, che ha un effetto negativo sulla propulsione a nuoto libero e sulle applicazioni plausibili.
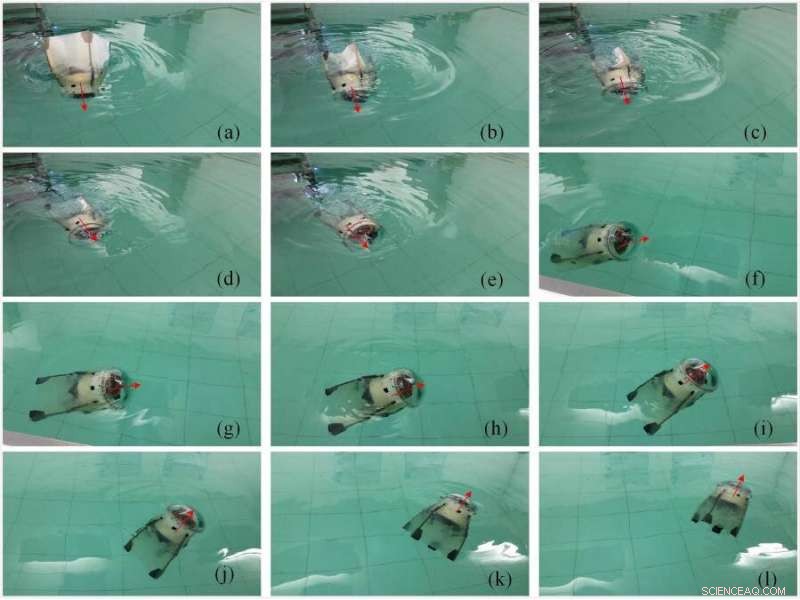
Istantanee di meduse robotiche che eseguono un movimento ibrido che intreccia nuoto verticale e orizzontale. Credito:©Science China Press
Risolvere questo problema, il gruppo di ricerca guidato dal Prof. Junzhi Yu dell'Institute of Automation, Accademia cinese delle scienze, ha studiato come viene progettato e controllato un sistema robotico simile a una medusa azionato da un motore bioispirato in grado di eseguire movimenti 3D.
Le meduse robotiche progettate sono modellate su Aurelia aurita (comunemente chiamata medusa lunare), che ha una cilindrata relativamente grande ed è particolarmente adatto per l'uso con grandi capacità di carico. È alto circa 138 mm e pesa circa 8,2 kg. Come illustrato nella Figura 1, la medusa robotica è di forma emisferica ed è costituita da una testa rigida a forma di campana, una cavità principale cilindrica, quattro meccanismi di collegamento a sei barre separati, e una morbida pelle di gomma. Per migliorare la manovrabilità della medusa robotica, viene introdotto un meccanismo di regolazione del baricentro montato all'interno della cavità. Attraverso la regolazione di due pesi a grappolo in direzione verticale o orizzontale o in una combinazione dei due, viene raggiunta la regolazione dell'atteggiamento.
"È molto difficile stabilire un modello dinamico preciso per il nuoto simile alle meduse, poiché è altamente non lineare, forte accoppiamento, e sistema variabile nel tempo, " detto dal Prof. Junzhi Yu. "Incertezze parametriche e disturbi esterni in ambienti acquatici dinamici, allo stesso tempo, causare difficoltà nel derivare leggi di controllo risolvendo il problema della cinematica inversa." Pertanto, un metodo di controllo dell'atteggiamento a circuito chiuso basato sull'apprendimento per rinforzo è proposto per la medusa robotica, che può risolvere il problema del controllo decisionale ottimale attraverso l'interazione diretta con l'ambiente, soprattutto senza la necessità di modellazione dinamica.
Finalmente, la proposta del metodo di controllo dell'atteggiamento basato sull'apprendimento per rinforzo rende possibile la regolazione autonoma dell'atteggiamento. "Rispetto alla maggior parte delle altre meduse robotiche, il robot costruito mostra un alto ordine di flessibilità della struttura e manovrabilità di imbardata, " Sottolinea Yu. Ha anche sottolineato che questa medusa robotica semovente con movimento 3D ha grandi implicazioni per la progettazione bioispirata del sistema di propulsione a getto con grande agilità.