Viene proposto un flusso di processo generico per guidare la stampa 3D di attuatori pneumatici morbidi in miniatura più piccoli di una moneta. Un dispositivo di rimozione dei detriti morbidi con una pinza in miniatura integrata può realizzare la navigazione attraverso uno spazio ristretto e la raccolta di piccoli oggetti in posizioni difficili da raggiungere. Attestazione:SUTD
I robot morbidi sono una classe di sistemi robotici realizzati con materiali conformi e in grado di adattarsi in sicurezza ad ambienti complessi. Hanno visto una rapida crescita di recente e sono disponibili in una varietà di design che coprono più scale di lunghezza, dai metri ai submicrometri.
In particolare, piccoli robot morbidi su scala millimetrica sono di interesse pratico in quanto possono essere progettati come una combinazione di attuatori in miniatura semplicemente azionati dalla pressione pneumatica. Sono anche adatti per la navigazione in aree ristrette e la manipolazione di piccoli oggetti.
Però, ridimensionando i robot pneumatici morbidi a millimetri si ottengono caratteristiche più fini che vengono ridotte di più di un ordine di grandezza. La complessità progettuale di tali robot richiede grande delicatezza quando vengono fabbricati con processi tradizionali come lo stampaggio e la litografia morbida. Sebbene le tecnologie di stampa 3D emergenti come l'elaborazione della luce digitale (DLP) offrano elevate risoluzioni teoriche, gestire vuoti e canali su microscala senza causare intasamento è stato ancora difficile. Infatti, esempi di successo di robot pneumatici morbidi in miniatura stampati in 3D sono rari.
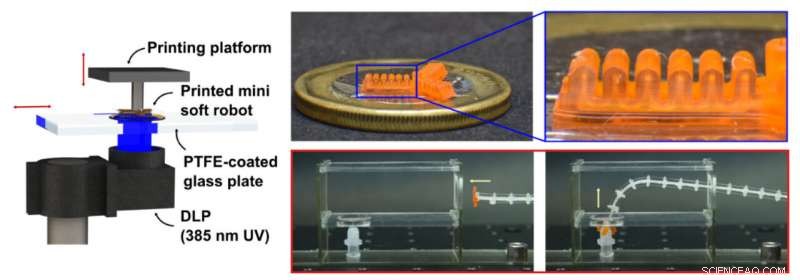
Recentemente, ricercatori di Singapore e Cina, vale a dire dalla Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech) e Zhejiang University (ZJU), ha proposto un flusso di processo generico per guidare la stampa 3D DLP di attuatori pneumatici in miniatura per robot morbidi con dimensioni complessive di 2-15 mm e dimensioni delle caratteristiche di 150-350 μm (fare riferimento all'immagine). La loro ricerca è stata pubblicata in Tecnologie avanzate dei materiali .
"Abbiamo sfruttato l'elevata efficienza e risoluzione della stampa 3D DLP per fabbricare attuatori robotici morbidi in miniatura, " ha affermato il Professore Associato Qi (Kevin) Ge di SUSTech, ricercatore capo del progetto di ricerca. "Per garantire una fedeltà di stampa affidabile e prestazioni meccaniche nei prodotti stampati, abbiamo introdotto un nuovo paradigma per la personalizzazione sistematica ed efficiente della formulazione del materiale e dei parametri chiave di lavorazione."
Nella stampa 3D DLP, i foto-assorbitori vengono comunemente aggiunti alle soluzioni polimeriche per migliorare le risoluzioni di stampa sia in direzione laterale che verticale. Nel frattempo, un aumento eccessivo della dose porta a un rapido degrado dell'elasticità del materiale, cruciale per i robot morbidi per sostenere grandi deformazioni.
"Per ottenere un ragionevole compromesso, abbiamo prima selezionato un fotoassorbitore con una buona capacità di assorbimento alla lunghezza d'onda della luce UV proiettata e determinato la formulazione del materiale appropriata sulla base di test di prestazioni meccaniche. Prossimo, abbiamo caratterizzato la profondità di polimerizzazione e la fedeltà XY per identificare la combinazione adatta di tempo di esposizione e spessore dello strato affettato, " ha spiegato il co-primo autore Yuan-Fang Zhang di SUTD.
"Seguendo questo flusso di processo, siamo in grado di produrre un assortimento di attuatori robotici pneumatici morbidi in miniatura con varie strutture e modalità di morphing, tutto più piccolo di una moneta da un dollaro di Singapore, su un sistema di stampa 3D multimateriale autocostruito. La stessa metodologia dovrebbe essere compatibile con la stereolitografia commerciale (SLA) o le stampanti 3D DLP poiché non è richiesta alcuna modifica hardware, ", ha affermato l'autore corrispondente, il professor Qi Ge di SUSTech.
Per esemplificare le potenziali applicazioni, i ricercatori hanno anche ideato un dispositivo di rimozione dei detriti morbidi che comprende un manipolatore continuo e una pinza pneumatica morbida in miniatura stampata in 3D. Può navigare in uno spazio ristretto e raccogliere piccoli oggetti in posizioni difficili da raggiungere.
L'approccio proposto apre la strada alla stampa 3D di robot morbidi in miniatura con geometrie complesse e sofisticati design multimateriale. Questa integrazione di attuatori pneumatici morbidi in miniatura stampati in un sistema robotico offre opportunità per potenziali applicazioni come la manutenzione dei motori a reazione e la chirurgia minimamente invasiva.