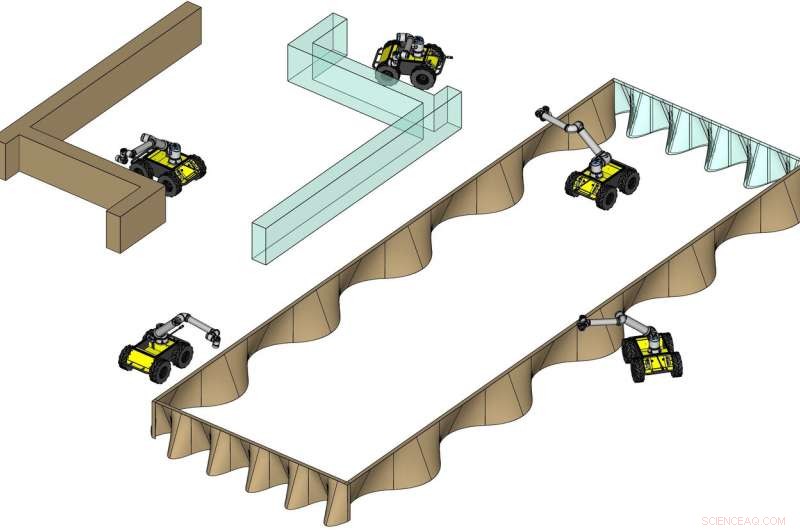
Un team multidisciplinare di robotica composto da professori della NYU Tandon School of Engineering sta progettando sistemi di controllo per stampanti 3D su bracci robotici in cima a dispositivi mobili, piattaforme mobili. Funzionando in team - un concetto chiamato produzione additiva collettiva (CAM) - queste stampanti, con l'apprendimento automatico e altre capacità di intelligenza artificiale (AI), potrebbe riparare le strutture civiche; lavorare nelle profondità oceaniche e nelle zone disastrate; o anche andare nello spazio per lavorare sulla Luna, Marte, e oltre. Attestazione:NYU Tandon
La stampa 3D commerciale, o produzione additiva (AM), è un settore in forte espansione. Ma se le stampanti fossero liberate dalla configurazione tipica che prevedeva una scatola immobile e un cavalletto, e liberati di lavorare in roving, team collaborativi, il business AM potrebbe essere molto più grande con molte più applicazioni, anche come muratori robotici nei cantieri e riparando infrastrutture civili urbane e rurali fatiscenti.
Un team di robotica multidisciplinare presso la NYU Tandon School of Engineering, ospitato dal Center for Urban Science and Progress (CUSP) della NYU e supportato da una sovvenzione di $ 1,2 milioni dalla National Science Foundation (NSF), sta lavorando per trasformare il concetto in realtà progettando sistemi autonomi per stampanti 3D su bracci robotici collegati a dispositivi mobili, piattaforme mobili. Funzionando in team - un concetto chiamato produzione additiva collettiva (CAM) - queste stampanti, con l'apprendimento automatico e altre capacità di intelligenza artificiale (AI), potrebbe riparare ponti, gallerie e altre strutture civiche; lavorare nelle profondità oceaniche e nelle zone disastrate; o anche andare nello spazio per lavorare sulla Luna, Marte, e oltre.
I ricercatori, Chen Feng, Maurizio Porfiri, Ludovico Righetti, e Weihua Jin, docenti dei Dipartimenti di Ingegneria Civile e Urbana, Ingegneria meccanica e aerospaziale, e Ingegneria Elettrica e Informatica, si concentrerà su tre aree fondamentali per rendere praticabili i team CAM di stampa 3D:autonomia, controllo, sistemi e reti in tempo reale:
Feng ha spiegato che l'obiettivo è la precisione, efficienza, e l'adattabilità all'ambiente e alle condizioni in tempo reale, piuttosto il modo in cui un'app di navigazione reindirizza un veicolo che rileva ha deviato da una rotta mappata. A differenza del tipico servizio di navigazione basato su GPS, però, le regolazioni devono essere fulminee e precise fino a pochi millimetri, non poche decine di metri. Ha aggiunto che la combinazione unica di competenza del team nella robotica, intelligenza artificiale, teoria del controllo, e i sistemi dinamici rendono le sfide superabili.
Feng si concentrerà sulla pianificazione e localizzazione, affrontare sfide come come consentire al robot di identificare quando e quando non ha bisogno di un alto grado di precisione nella localizzazione.
"Il robot deve potersi muovere velocemente nell'area di stampa, osservare le condizioni reali, come il terreno irregolare, dal momento che il mondo reale non è planare, quindi compensa immediatamente, " ha detto. "E mentre vogliamo avere un maggiore grado di precisione nell'area della struttura, più sei lontano dalla struttura meno hai bisogno, " ha spiegato. "Ciò comporterà un nuovo tipo di localizzazione proattiva".
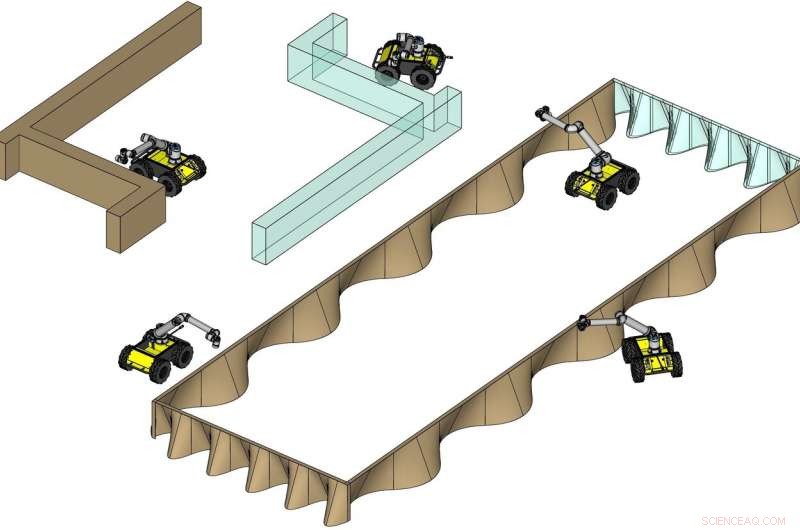
Professori della NYU Tandon Chen Feng, Ludovic Righetti e Maurizio Porfiri stanno progettando sistemi per la produzione additiva collettiva, in cui squadre di robot mobili per la stampa 3D lavorano insieme per riparare o costruire strutture, o anche lavorare sulla luna o su Marte. Attestazione:NYU Tandon
Righetti lavorerà su algoritmi di controllo ottimale in tempo reale di ogni stampante mobile, per consentire al robot di adattarsi rapidamente all'ambiente.
"Ogni robot deve osservare cosa viene stampato, associarlo autonomamente alla progettazione, e riconoscere istantaneamente se la struttura stampata si è discostata da essa, e di quanto, e nel frattempo decidere quali sono le prossime azioni migliori per garantire la corretta stampa della struttura, " Egli ha detto.
Porfiri svilupperà un quadro matematico per consentire ai robot di coordinare autonomamente le rispettive azioni all'interno dell'ambiente fisico in evoluzione, consentendo a più stampanti mobili di creare contemporaneamente una struttura con maggiore efficienza. Questa capacità sarebbe particolarmente importante in luoghi come Marte dove non c'è un server remoto abbastanza vicino da controllare gli sforzi coordinati dei robot senza un ritardo.
"Diverso dai droni che volano in formazione o dalle auto autonome che si tengono a distanza l'una dall'altra, le nostre stampanti portatili lasciano un'impronta unica nell'ambiente fisico:l'oggetto da stampare. Il mio lavoro sfrutterà proprio questa impronta per stabilire algoritmi efficaci per il coordinamento e la stampa collettiva".
Jin aiuterà il team a sviluppare nuovi materiali compositi adatti alla stampa mobile 3D del calcestruzzo. Il team prevede di dimostrare l'efficacia degli algoritmi mediante la stampa 3D del mondo reale di quei nuovi calcestruzzi utilizzando stampanti mobili che costruiranno alla NYU Tandon.
"Per liberare tutto il potenziale della produzione additiva collettiva, diversi confini scientifici devono essere spinti, garantendo l'implementazione ottimale di più robot mobili che stampano strutture di grandi dimensioni secondo un approccio ingegnerizzato, progettazione virtuale, " ha detto Feng.
Il progetto prevede un workshop di settore su CAM, una mostra pubblica all'aperto, kit educativo accessibile/aperto su CAM, Concorso CAM su scala desktop K-12, attività imprenditoriali e uno sforzo di diversità per studenti di ogni provenienza.