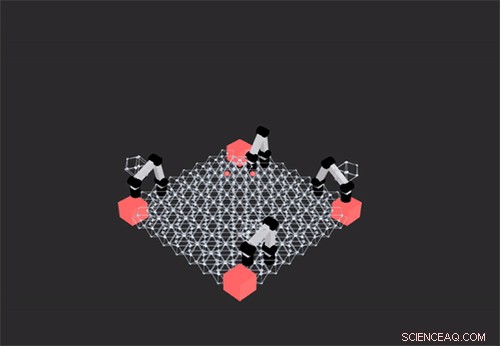
La simulazione al computer mostra un gruppo di quattro robot assemblatori al lavoro per costruire una struttura tridimensionale. Interi sciami di tali robot potrebbero essere scatenati per creare grandi strutture come ali di aeroplani o habitat spaziali. Credito:Massachusetts Institute of Technology
Gli aerei commerciali odierni sono generalmente fabbricati in sezioni, spesso in luoghi diversi:ali in una fabbrica, sezioni di fusoliera in un altro, componenti della coda da qualche altra parte e poi trasportati in un impianto centrale in enormi aerei da carico per l'assemblaggio finale.
Ma cosa accadrebbe se l'assemblea finale fosse l'unica, con l'intero aereo costruito con una vasta gamma di minuscoli pezzi identici, tutti messi insieme da un esercito di minuscoli robot?
Questa è la visione dello studente laureato Benjamin Jenett, lavorando con il professor Neil Gershenfeld nel Center for Bits and Atoms (CBA) del MIT, ha portato avanti come lavoro di tesi di dottorato. Ora è arrivato il punto che le versioni prototipo di tali robot possono assemblare piccole strutture e persino lavorare insieme come una squadra per costruire assemblaggi più grandi.
Il nuovo lavoro appare nel numero di ottobre di IEEE Robotics and Automation Letters, in un articolo di Jenett, Gershenfeld, compagno di studi Amira Abdel-Rahman, e l'alunno della CBA Kenneth Cheung SM '07, dottorato di ricerca '12, che ora è all'Ames Research Center della NASA, dove guida il progetto ARMADAS per progettare una base lunare che potrebbe essere costruita con un assemblaggio robotico.
"Questa carta è una delizia, "dice Aaron Becker, professore associato di ingegneria elettrica e informatica presso l'Università di Houston, che non era associato a questo lavoro. "Combina un design meccanico di prim'ordine con dimostrazioni sbalorditive, nuovo hardware robotico, e una suite di simulazione con oltre 100, 000 elementi, " lui dice.
Credito:Massachusetts Institute of Technology
"Ciò che è al centro di questo è un nuovo tipo di robotica, che chiamiamo robot relativi, " dice Gershenfeld. Storicamente, lui spiega, ci sono state due grandi categorie di robotica:quelle realizzate con costosi componenti personalizzati accuratamente ottimizzati per particolari applicazioni come l'assemblaggio in fabbrica, e quelli realizzati con moduli economici prodotti in serie con prestazioni molto inferiori. I nuovi robot, però, sono un'alternativa ad entrambi. Sono molto più semplici dei primi, mentre molto più capace di quest'ultimo, e hanno il potenziale per rivoluzionare la produzione di sistemi su larga scala, dagli aeroplani ai ponti fino a interi edifici.
Secondo Gershenfeld, la differenza fondamentale risiede nella relazione tra il dispositivo robotico e i materiali che sta maneggiando e manipolando. Con questi nuovi tipi di robot, "non puoi separare il robot dalla struttura:lavorano insieme come un sistema, "dice. Ad esempio, mentre la maggior parte dei robot mobili richiede sistemi di navigazione altamente precisi per tenere traccia della propria posizione, i nuovi robot assemblatori devono solo tenere traccia di dove si trovano in relazione alle piccole subunità, chiamati voxel, su cui stanno attualmente lavorando. Ogni volta che il robot fa un passo sul voxel successivo, riaggiusta il suo senso della posizione, sempre in relazione ai componenti specifici su cui si trova in questo momento.
La visione di fondo è che proprio come le immagini più complesse possono essere riprodotte utilizzando una matrice di pixel su uno schermo, praticamente qualsiasi oggetto fisico può essere ricreato come una serie di pezzi tridimensionali più piccoli, o voxel, che possono essere a loro volta costituiti da semplici puntoni e nodi. Il team ha dimostrato che questi semplici componenti possono essere disposti per distribuire i carichi in modo efficiente; sono in gran parte costituiti da open space in modo da ridurre al minimo il peso complessivo della struttura. Le unità possono essere prelevate e posizionate l'una accanto all'altra dai semplici montatori, e poi fissati insieme utilizzando sistemi di aggancio integrati in ciascun voxel.
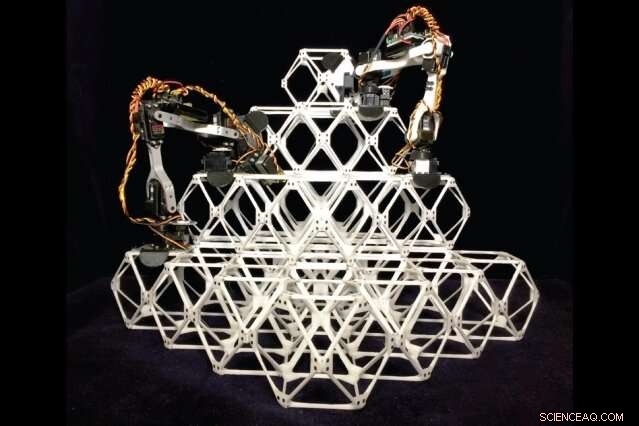
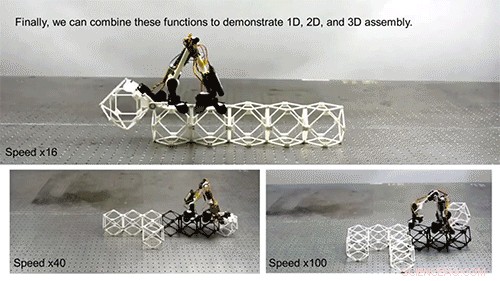
La foto mostra due prototipi di robot assemblatori al lavoro che mettono insieme una serie di piccole unità, noti come voxel, in una struttura più ampia. Credito:Benjamin Jenett
I robot stessi assomigliano a un piccolo braccio, con due lunghi segmenti incernierati nel mezzo, e dispositivi per il bloccaggio sulle strutture di voxel su ciascuna estremità. I semplici dispositivi si muovono come vermi, avanzando lungo una fila di voxel aprendo e chiudendo ripetutamente i loro corpi a forma di V per passare da uno all'altro. Jenett ha soprannominato i piccoli robot BILL-E (un cenno al robot cinematografico WALL-E), che sta per Bipedal Isotropic Lattice Locomoting Explorer.
Jenett ha costruito diverse versioni degli assemblatori come progetti di proof-of-concept, insieme ai corrispondenti design voxel dotati di meccanismi di aggancio per attaccare o staccare facilmente ciascuno dai suoi vicini. Ha usato questi prototipi per dimostrare l'assemblaggio dei blocchi in lineari, bidimensionale, e strutture tridimensionali. "Non mettiamo la precisione nel robot; la precisione viene dalla struttura" man mano che prende forma, dice Jenet. "È diverso da tutti gli altri robot. Ha solo bisogno di sapere qual è il suo prossimo passo".
Mentre lavora sull'assemblaggio dei pezzi, ognuno dei minuscoli robot può contare i suoi passi sulla struttura, dice Gershenfeld, chi è il direttore di CBA. Insieme alla navigazione, questo consente ai robot di correggere gli errori ad ogni passaggio, eliminando la maggior parte della complessità dei tipici sistemi robotici, lui dice. "Manca la maggior parte dei soliti sistemi di controllo, ma finché non sbaglia un passo, sa dove si trova." Per applicazioni pratiche di montaggio, sciami di tali unità potrebbero collaborare per accelerare il processo, grazie al software di controllo sviluppato da Abdel-Rahman che può consentire ai robot di coordinare il proprio lavoro ed evitare di intralciarsi a vicenda.
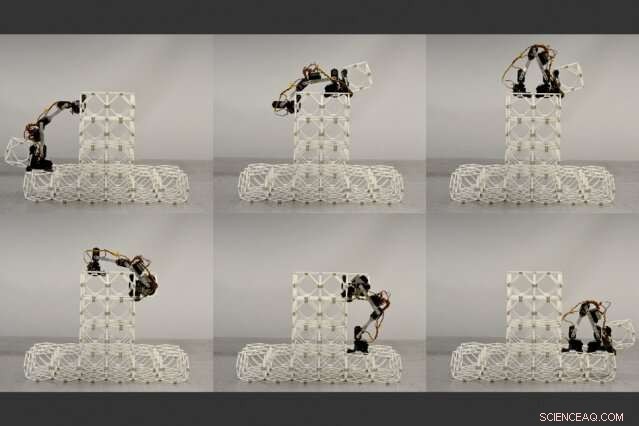
La sequenza di foto mostra un robot assemblatore al lavoro, trasportare un'unità strutturale sopra e sotto l'altro lato di una struttura in costruzione. Credito:Benjamin Jenett
Questo tipo di assemblaggio di grandi strutture da subunità identiche utilizzando un semplice sistema robotico, proprio come un bambino che assembla un grande castello con i mattoncini LEGO, ha già attirato l'interesse di alcuni importanti potenziali utilizzatori, compresa la NASA, Il collaboratore del MIT in questa ricerca, e la compagnia aerospaziale europea Airbus SE, che ha anche contribuito a sponsorizzare lo studio.
Un vantaggio di tale assemblaggio è che le riparazioni e la manutenzione possono essere gestite facilmente con lo stesso tipo di processo robotico dell'assemblaggio iniziale. Le sezioni danneggiate possono essere smontate dalla struttura e sostituite con nuove, producendo una struttura altrettanto robusta dell'originale. "Decostruire è importante quanto costruire, "Gershenfeld dice, e questo processo può essere utilizzato anche per apportare modifiche o miglioramenti al sistema nel tempo.
"Per una stazione spaziale o un habitat lunare, questi robot vivrebbero sulla struttura, mantenerlo e ripararlo continuamente, "dice Jenet.
In definitiva, tali sistemi potrebbero essere utilizzati per costruire interi edifici, soprattutto in ambienti difficili come nello spazio, o sulla luna o su Marte, dice Gershenfeld. Ciò potrebbe eliminare la necessità di spedire grandi strutture preassemblate dalla Terra. Invece potrebbe essere possibile inviare grandi lotti di minuscole subunità, o formarli da materiali locali utilizzando sistemi che potrebbero sfornare queste subunità nel punto di destinazione finale. "Se puoi fare un jumbo jet, puoi fare un edificio, " dice Gershenfeld.
Sandor Fekete, direttore dell'Istituto di sistemi operativi e reti di computer presso l'Università tecnica di Braunschweig, in Germania, chi non era coinvolto in questo lavoro, dice "Ultraleggero, materiali digitali come [questi] aprono prospettive sorprendenti per la costruzione efficiente, complesso, strutture di grandi dimensioni, che sono di vitale importanza nelle applicazioni aerospaziali."
Ma assemblare tali sistemi è una sfida, dice Fekete, che intende unirsi al gruppo di ricerca per l'ulteriore sviluppo dei sistemi di controllo. "È qui che l'uso di robot piccoli e semplici promette di fornire la prossima svolta:i robot non si stancano o si annoiano, e l'utilizzo di molti robot in miniatura sembra l'unico modo per portare a termine questo lavoro fondamentale. Questo lavoro estremamente originale e intelligente di Ben Jennet e collaboratori fa un passo da gigante verso la costruzione di ali di aeroplano regolabili dinamicamente, enormi vele solari o persino habitat spaziali riconfigurabili".
Nel processo, Gershenfeld dice, "siamo come se stessimo scoprendo un nuovo campo di sistemi ibridi materiale-robot".
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.