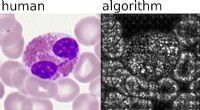
Scansione LiDAR singola (sinistra), i dati sovrapposti (a destra) con le descrizioni (colori) fornite da un osservatore umano e il risultato del software (al centro). Credito:AG Computer Vision der Universität Bonn
I bravi guidatori anticipano le situazioni pericolose e adattano la loro guida prima che le cose diventino rischiose. I ricercatori dell'Università di Bonn ora vogliono insegnare questa abilità anche alle auto a guida autonoma. Presenteranno un algoritmo corrispondente alla Conferenza internazionale sulla visione artificiale che si terrà venerdì, 1 novembre, a Seul. Presenteranno anche un set di dati che hanno usato per addestrare e testare il loro approccio. Renderà molto più facile sviluppare e migliorare tali processi in futuro.
Una strada vuota, una fila di macchine parcheggiate a lato:niente che indichi che bisogna stare attenti. Ma aspetta:non c'è una strada laterale più avanti, mezzo coperto dalle macchine parcheggiate? Forse è meglio che tolga il piede dall'acceleratore, chissà se qualcuno arriva di lato. Incontriamo costantemente situazioni come queste durante la guida. Interpretarli correttamente e trarre le giuste conclusioni richiede molta esperienza. In contrasto, le auto a guida autonoma a volte si comportano come un principiante nella sua prima lezione. "Il nostro obiettivo è insegnare loro uno stile di guida più previdente, " spiega l'informatico Prof. Dr. Jürgen Gall. "Questo consentirebbe loro di reagire molto più rapidamente a situazioni pericolose".
Gall presiede il gruppo di lavoro "Computer Vision" presso l'Università di Bonn, quale, in collaborazione con i suoi colleghi universitari dell'Istituto di fotogrammetria e del gruppo di lavoro "Sistemi intelligenti autonomi", sta cercando una soluzione a questo problema. Gli scienziati presentano ora un primo passo verso questo obiettivo al principale simposio della disciplina di Gall, la Conferenza Internazionale sulla Computer Vision a Seoul. "Abbiamo perfezionato un algoritmo che completa e interpreta i cosiddetti dati LiDAR, " spiega. "Ciò consente all'auto di anticipare i potenziali pericoli in una fase iniziale".
Problema:pochi dati
LiDAR è un laser rotante montato sul tetto della maggior parte delle auto a guida autonoma. Il raggio laser viene riflesso dall'ambiente circostante. Il sistema LiDAR misura quando la luce riflessa cade sul sensore e utilizza questo tempo per calcolare la distanza. "Il sistema rileva la distanza a circa 120, 000 punti intorno al veicolo per giro, "dice Gallo.
Il problema con questo:i punti di misurazione diventano "diluiti" all'aumentare della distanza, il divario tra loro si allarga. È come dipingere una faccia su un palloncino:quando lo gonfi, gli occhi si allontanano sempre di più. Anche per un essere umano è quindi quasi impossibile ottenere una corretta comprensione dell'ambiente circostante da una singola scansione LiDAR (ovvero le misurazioni della distanza di un singolo giro). "Alcuni anni fa, l'Università di Karlsruhe (KIT) ha registrato grandi quantità di dati LiDAR, un totale di 43, 000 scansioni, " spiega il dott. Jens Behley dell'Istituto di fotogrammetria. "Abbiamo ora preso sequenze da diverse dozzine di scansioni e le abbiamo sovrapposte". I dati così ottenuti contengono anche punti che il sensore aveva registrato solo quando l'auto aveva già percorso alcune una dozzina di metri più avanti lungo la strada. In parole povere, mostrano non solo il presente, ma anche il futuro.
"Queste nuvole di punti sovrapposte contengono informazioni importanti come la geometria della scena e le dimensioni spaziali degli oggetti in essa contenuti, che non sono disponibili in una singola scansione, " sottolinea Martin Garbade, che attualmente sta facendo il suo dottorato presso l'Istituto di Informatica. "Inoltre, abbiamo etichettato ogni singolo punto in loro, per esempio:c'è un marciapiede, c'è un pedone e dietro c'è un motociclista." Gli scienziati hanno alimentato il loro software con una coppia di dati:una singola scansione LiDAR come input e i dati sovrapposti associati, comprese le informazioni semantiche come output desiderato. Hanno ripetuto questo processo per diverse migliaia di tali coppie.
"Durante questa fase di formazione, l'algoritmo appreso per completare e interpretare le singole scansioni, " spiega il prof. Gall. "Ciò significava che poteva plausibilmente aggiungere misurazioni mancanti e interpretare ciò che è stato visto nelle scansioni." Il completamento della scena funziona già relativamente bene:il processo può completare correttamente circa la metà dei dati mancanti. L'interpretazione semantica, cioè dedurre quali oggetti sono nascosti dietro i punti di misurazione, non funziona altrettanto bene:qui, il computer raggiunge una precisione massima del 18 percento.
Però, gli scienziati considerano questo ramo di ricerca ancora agli inizi. "Fino ad ora, c'è stata semplicemente una mancanza di ampi set di dati con cui addestrare i corrispondenti metodi di intelligenza artificiale, " sottolinea Gall. "Stiamo colmando un gap qui con il nostro lavoro. Sono ottimista sul fatto che saremo in grado di aumentare significativamente il tasso di accuratezza nell'interpretazione semantica nei prossimi anni." Ritiene che il 50 percento sia abbastanza realistico, che potrebbe avere un'enorme influenza sulla qualità della guida autonoma.