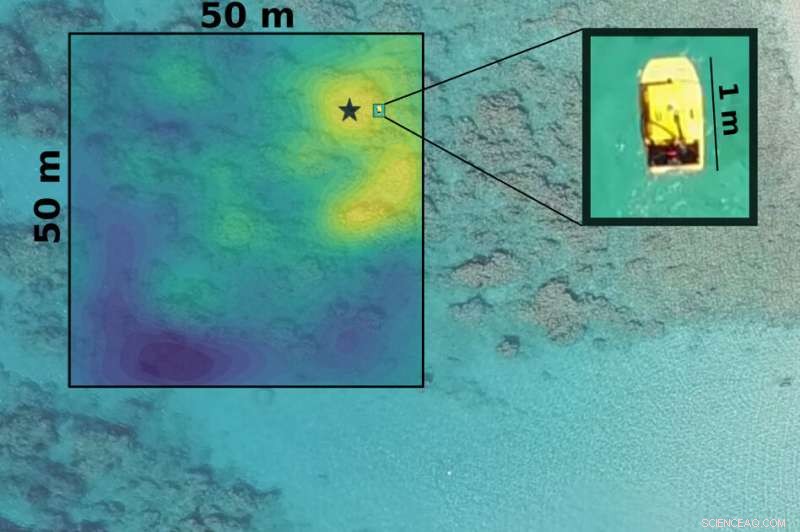
Anche in acque inesplorate, un sistema robotico sviluppato dal MIT può fiutare in modo efficiente oggetti preziosi, punti difficili da trovare da cui raccogliere campioni. Quando implementato in barche autonome dispiegate al largo delle Barbados (nella foto), il sistema ha trovato rapidamente la testa di corallo più esposta, il che significa che si trovava nel punto più superficiale, utile per studiare l'impatto dell'esposizione al sole sugli organismi corallini. Credito:Massachusetts Institute of Technology
Un sistema robotico autonomo inventato dai ricercatori del MIT e della Woods Hole Oceanographic Institution (WHOI) individua in modo efficiente i punti di campionamento più scientificamente interessanti, ma difficili da trovare, in vaste aree acque inesplorate.
Gli scienziati ambientali sono spesso interessati a raccogliere campioni nei luoghi più interessanti, o "massimo, " in un ambiente. Un esempio potrebbe essere una fonte di perdite di sostanze chimiche, dove la concentrazione è la più alta e per lo più incontaminata da fattori esterni. Ma un massimo può essere qualsiasi valore quantificabile che i ricercatori vogliono misurare, come la profondità dell'acqua o le parti della barriera corallina più esposte all'aria.
Gli sforzi per implementare i robot che cercano la massima ricerca soffrono di problemi di efficienza e precisione. Comunemente, i robot si muoveranno avanti e indietro come tosaerba per coprire un'area, che richiede tempo e raccoglie molti campioni non interessanti. Alcuni robot rilevano e seguono percorsi ad alta concentrazione fino alla fonte della perdita. Ma possono essere fuorviati. Per esempio, le sostanze chimiche possono rimanere intrappolate e accumularsi in fessure lontane da una fonte. I robot possono identificare quei punti ad alta concentrazione come la fonte, ma non essere neanche lontanamente vicini.
In un documento presentato alla Conferenza internazionale sui robot e i sistemi intelligenti (IROS), i ricercatori descrivono "PLUMES, " un sistema che consente ai robot mobili autonomi di puntare al massimo in modo molto più rapido ed efficiente. PLUMES sfrutta le tecniche probabilistiche per prevedere quali percorsi possono portare al massimo, durante la navigazione ostacoli, correnti mutevoli, e altre variabili. Mentre raccoglie campioni, pesa ciò che ha imparato per determinare se continuare lungo un percorso promettente o cercare l'ignoto, che potrebbe ospitare campioni più preziosi.
È importante sottolineare che PLUMES raggiunge la sua destinazione senza mai rimanere intrappolato in quei punti difficili e ad alta concentrazione. "È importante, perché è facile pensare di aver trovato l'oro, ma davvero hai trovato l'oro degli sciocchi, " dice la co-autrice Victoria Preston, un dottorato di ricerca studente del Laboratorio di Informatica e Intelligenza Artificiale (CSAIL) e del Joint Program MIT-WHOI.
I ricercatori hanno costruito una barca robotica alimentata da PLUMES che ha rilevato con successo la testa di corallo più esposta nel Bellairs Fringing Reef alle Barbados, il che significa, si trovava nel punto più superficiale, utile per studiare l'impatto dell'esposizione al sole sugli organismi corallini. In 100 prove simulate in diversi ambienti sottomarini, un robot PLUMES virtuale ha anche raccolto costantemente da sette a otto volte più campioni di massimi rispetto ai metodi di copertura tradizionali in intervalli di tempo assegnati.
"PLUMES fa la minima quantità di esplorazione necessaria per trovare il massimo e poi si concentra rapidamente sulla raccolta di campioni preziosi lì, ", afferma la co-autrice Genevieve Flaspohler, un dottorato di ricerca studente e in CSAIL e nel Joint Program MIT-WHOI.
Insieme a Preston e Flaspohler sul giornale ci sono:Anna P.M. Michel e Yogesh Girdhar, entrambi scienziati del Dipartimento di fisica e ingegneria applicata dell'oceano presso l'OMS; e Nicholas Roy, professore al CSAIL e al Dipartimento di Aeronautica e Astronautica.
Navigare in un compromesso tra exploit ed esplorazione
Un'intuizione chiave di PLUMES è stata l'utilizzo di tecniche dalla probabilità alla ragione per navigare nel notoriamente complesso compromesso tra lo sfruttamento di ciò che si è appreso sull'ambiente e l'esplorazione di aree sconosciute che potrebbero essere più preziose.
"La sfida principale nella ricerca del massimo è consentire al robot di bilanciare lo sfruttamento delle informazioni da luoghi che sa già avere alte concentrazioni ed esplorare luoghi di cui non sa molto, " dice Flaspohler. "Se il robot esplora troppo, non raccoglierà abbastanza campioni preziosi al massimo. Se non esplora abbastanza, potrebbe mancare completamente il massimo."
Caduto in un nuovo ambiente, un robot alimentato da PLUMES utilizza un modello statistico probabilistico chiamato processo gaussiano per fare previsioni sulle variabili ambientali, come le concentrazioni chimiche, e stimare le incertezze di rilevamento. PLUMES genera quindi una distribuzione dei possibili percorsi che il robot può intraprendere, e utilizza i valori stimati e le incertezze per classificare ogni percorso in base a quanto bene consente al robot di esplorare e sfruttare.
All'inizio, PLUMES sceglierà percorsi che esplorano casualmente l'ambiente. Ogni campione, però, fornisce nuove informazioni sui valori mirati nell'ambiente circostante, come i punti con le più alte concentrazioni di sostanze chimiche o le profondità più basse. Il modello di processo gaussiano sfrutta quei dati per restringere i possibili percorsi che il robot può seguire dalla sua data posizione per campionare da posizioni con un valore ancora più alto. PLUMES utilizza una nuova funzione obiettivo, comunemente utilizzata nell'apprendimento automatico per massimizzare una ricompensa, per stabilire se il robot debba sfruttare le conoscenze passate o esplorare la nuova area.
Percorsi "allucinanti"
La decisione su dove raccogliere il prossimo campione si basa sulla capacità del sistema di "allucinare" tutte le possibili azioni future dalla sua posizione attuale. Fare così, sfrutta una versione modificata di Monte Carlo Tree Search (MCTS), una tecnica di pianificazione del percorso resa popolare per alimentare sistemi di intelligenza artificiale che gestiscono giochi complessi, come Vai e Scacchi.
MCTS utilizza un albero decisionale, una mappa di nodi e linee collegati, per simulare un percorso, o sequenza di mosse, necessario per raggiungere un'azione vincente finale. Ma nei giochi, lo spazio per possibili percorsi è finito. In ambienti sconosciuti, con dinamiche mutevoli in tempo reale, lo spazio è effettivamente infinito, rendendo la pianificazione estremamente difficile. I ricercatori hanno progettato "MCTS di osservazione continua, " che sfrutta il processo gaussiano e la nuova funzione obiettivo per cercare in questo spazio ingombrante di possibili percorsi reali.
La radice di questo albero decisionale MCTS inizia con un nodo "credenza", che è il prossimo passo immediato che il robot può compiere. Questo nodo contiene l'intera cronologia delle azioni e delle osservazioni del robot fino a quel momento. Quindi, il sistema espande l'albero dalla radice in nuove linee e nodi, esaminando diverse fasi di azioni future che portano ad aree esplorate e inesplorate.
Quindi, il sistema simula cosa accadrebbe se prendesse un campione da ciascuno di quei nodi appena generati, sulla base di alcuni modelli che ha appreso da osservazioni precedenti. A seconda del valore del nodo simulato finale, l'intero percorso riceve un punteggio di ricompensa, con valori più alti che equivalgono ad azioni più promettenti. I punteggi premio di tutti i percorsi vengono riportati al nodo radice. Il robot seleziona il percorso con il punteggio più alto, fa un passo, e raccoglie un campione reale. Quindi, utilizza i dati reali per aggiornare il suo modello di processo gaussiano e ripete il processo di "allucinazione".
"Finché il sistema continua ad avere allucinazioni che potrebbe esserci un valore più alto in parti invisibili del mondo, deve continuare ad esplorare, " dice Flaspohler. "Quando finalmente converge in un punto si stima che sia il massimo, perché non può allucinare un valore più alto lungo il percorso, poi smette di esplorare."
Ora, i ricercatori stanno collaborando con gli scienziati della WHOI per utilizzare i robot alimentati da PLUMES per localizzare i pennacchi chimici nei siti vulcanici e studiare i rilasci di metano negli estuari costieri in fusione nell'Artico. Gli scienziati sono interessati alla fonte dei gas chimici rilasciati nell'atmosfera, ma questi siti di test possono estendersi su centinaia di miglia quadrate.
"Possono [usare PLUMES per] dedicare meno tempo all'esplorazione di quella vasta area e concentrarsi davvero sulla raccolta di campioni scientificamente preziosi, "dice Preston.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.