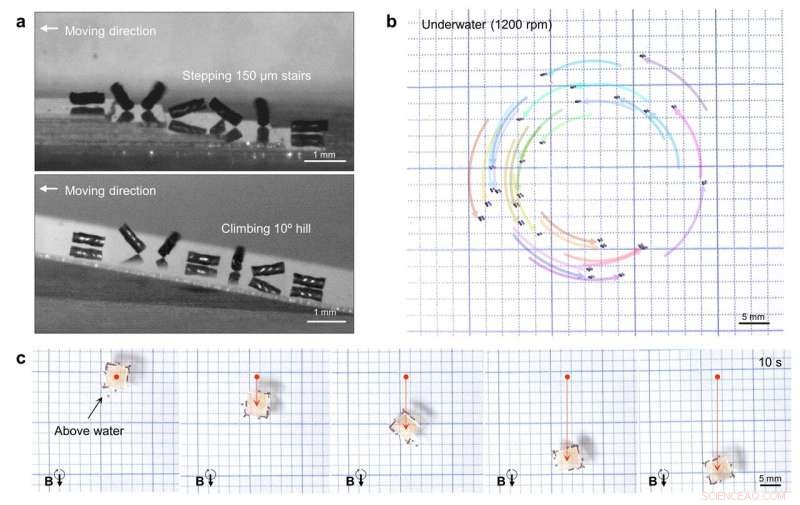
La magnetomotilità gerarchica guidata da movimenti rotatori e rotanti di robot morbidi magnetici elicoidali consente (a) di scavalcare ostacoli, (b) nuoto subacqueo di più robot morbidi, e (c) trasporto collettivo di merci tramite un unico asse rotante di magneti permanenti. Credito:Inha University
I robot magnetici morbidi sono un'opzione promettente per il controllo senza contatto in ambienti ristretti tramite stimoli magnetici esterni. Moti magneto-indotti, cioè., magnetomotilità, sono guidati dalla deformazione locale di un robot per cui gli allineamenti delle particelle e le distribuzioni polari alternate sono programmate nel corpo. I tentativi di programmare l'anisotropia magnetica nei robot morbidi sono stati eseguiti tramite la stampa laser diretta (DLP), stereolitografia (SLA) e fabbricazione di filamenti fusi (FDM) combinati con manipolazione multiassiale di elettromagneti.
Ora, i ricercatori hanno dimostrato metodi di preparazione e attuazione semplici di robot magnetici morbidi senza regolazione elettromagnetica. Hanno costruito un robot morbido elicoidale tridimensionale attraverso la torsione di un film composito polimerico bidimensionale. I nanocompositi termoplastici poliuretano-magnetite hanno consentito la super-torsione dei film a causa dell'elevato allungamento; l'uso di materiali termoplastici ha inoltre consentito di fissare termicamente l'architettura ritorta. Il denso corpo elicoidale dei robot magnetici morbidi ha permesso la magnetomotilità gerarchica, comprese le rotazioni in senso orario e le rivoluzioni in senso antiorario risultanti da due magneti permanenti con un unico asse di rotazione che ruota in senso orario sotto i substrati.
Nella manipolazione magnetica di più robot morbidi, il controllo del singolo robot rimane una manovra complessa poiché la rispettiva traiettoria di ciascun robot è coordinata contemporaneamente lungo percorsi diversi. Il funzionamento senza batteria di questi robot morbidi magnetici multipli è stato eseguito attraverso variazioni nelle frequenze dei magneti rotanti nel piano mentre i robot morbidi con proporzioni diverse sono stati azionati con altre modalità di rotazione:rotazione, pivottante, e rotolamento, anche a velocità di rotazione identica. Oltre alla manovra orbitale dei raggi, velocità, e percorsi dei molteplici soft robot, la locomozione agile fino a 60 di lunghezza del corpo s-1 e la magnetomotilità gerarchica hanno aiutato i robot morbidi a superare ostacoli come scale, colline e superfici rugose sotto una sorgente magnetica perennemente rotante e senza la regolazione multidirezionale dei campi magnetici.
I ricercatori hanno anche dimostrato la cooperazione tra più robot magnetici morbidi ispirati alla qualità collettiva del trasporto merci nelle colonie di formiche. Il comportamento collettivo è un'osservazione comune in natura con esempi trovati nella migrazione cellulare, colonie di formiche, e banchi di pesci, per dirne alcuni. Però, è difficile ottenere questo progetto nei robot collettivi perché la dinamica dei movimenti robotici sia individuali che collettivi deve essere ottimizzata da analisi sia computazionali che sperimentali. Questi requisiti diventano inutili nel presente studio, poiché le forze capillari agiscono per fissare i robot morbidi rotanti e rotanti attorno al carico. Il trasferimento dei magneti sotto i robot comporta un trasporto facilitato di oggetti pesanti simile al comportamento lavorativo delle formiche.
Queste nuove tecniche di manovra orbitale su richiesta tramite magnetomotilità gerarchica possono essere ampliate per applicazioni biomediche in cui nuotatori magnetici miniaturizzati possono potenzialmente fornire farmaci in spazi con configurazioni complesse.














