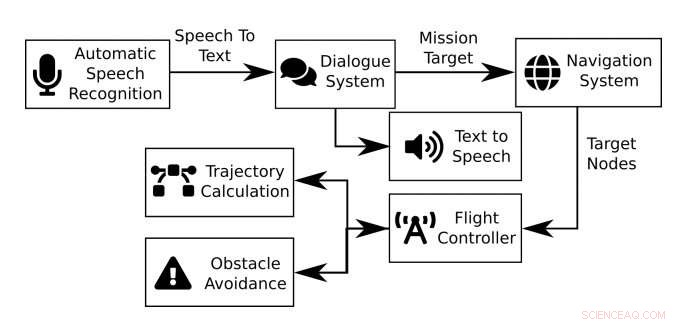
Una panoramica del sistema. Credito:Fuhrman et al.
I ricercatori del Karlsruhe Institute of Technology in Germania hanno recentemente sviluppato un drone interattivo progettato per assistere gli esseri umani in ambienti interni come uffici o laboratori. In un articolo prepubblicato su arXiv, i ricercatori hanno presentato i risultati ottenuti dal loro drone durante il completamento di semplici compiti in laboratorio.
"In questo documento, presentiamo un assistente drone per ufficio al coperto che ha il compito di fare commissioni e svolgere semplici compiti presso il nostro laboratorio, mentre riceve istruzioni e interagisce con gli umani nello spazio, " hanno scritto i ricercatori nel loro articolo.
L'approccio alla progettazione del drone adottato dai ricercatori è incentrato sulla nozione di "missioni, " che comporta la ricezione dei parametri di input e il soddisfacimento delle condizioni di successo, o "obiettivi". Per completare con successo una missione, il loro drone dovrebbe essere in grado di raggiungere tutti gli obiettivi ad esso associati.
"Nel caso del sistema presentato in questo documento, il parametro di input è una richiesta verbale di volare verso una determinata destinazione (stanza o persona) in un ambiente di ufficio, " hanno spiegato i ricercatori nel loro documento. "L'obiettivo della missione è raggiungere l'obiettivo senza alcun intervento manuale e collisione con ostacoli statici o dinamici".
Il drone interattivo presentato dai ricercatori è una versione modificata del drone Crazyflie 2.0, progettato da una società chiamata Bitcraze. Ha diversi componenti:un sottosistema di riconoscimento vocale automatico (ASR) che trascrive le richieste verbali di un utente; un sistema di dialogo che riceve queste richieste, li elabora e individua il target all'interno dell'ufficio, e un controllore di volo che pianifica la traiettoria del drone verso il bersaglio desiderato mentre cerca di evitare collisioni con ostacoli.
I ricercatori hanno deciso di valutare separatamente ciascuno dei componenti del sistema per identificare chiaramente le caratteristiche che dovevano essere perfezionate. Per valutare il sistema di dialogo, hanno chiesto a tre non madrelingua inglese di dare semplici istruzioni verbali ad alta voce, ad esempio, ordinare al drone di volare in un'altra stanza o visitare un'altra persona in laboratorio.
Successivamente, i ricercatori hanno testato la percezione della profondità del loro drone e le capacità di prevenzione delle collisioni presentando al drone tre diversi tipi di ostacoli:una porta chiusa, una persona, e una panca di metallo. Finalmente, hanno studiato la velocità con cui il loro sistema poteva completare con successo le missioni inviandolo a varie stanze bersaglio utilizzando istruzioni scritte.

Uno dei droni Crazylife utilizzati dai ricercatori. Credito:Fuhrman et al.
Mentre, il drone è stato trovato per completare le missioni con un tasso di successo del 77,78 percento, hanno scoperto che aveva diversi limiti. Ad esempio, una delle cause più comuni di fallimento della missione è stata la leggera virata del drone durante il decollo, poiché le sue quattro eliche hanno iniziato a funzionare in tempi leggermente diversi.
"Dato che questo è il nostro primo prototipo, c'è molto spazio per miglioramenti futuri, non solo su ciascuno dei singoli componenti ma anche sul sistema nel suo insieme, " hanno detto i ricercatori.
Il team ha osservato che il sistema di dialogo del drone funzionava particolarmente male e poteva comprendere le istruzioni di una persona nella migliore delle ipotesi nel 57 percento dei casi. Il problema principale con il sistema di dialogo era che l'ASR presentava difficoltà nell'identificare i nomi delle persone quando pronunciati dagli utenti, interrompendo così il processo di riconoscimento vocale troppo presto.
"Nel lavoro futuro, vogliamo utilizzare un sistema ARS migliorato, " hanno scritto i ricercatori nel loro articolo. "Inoltre, al fine di consentire una più ampia varietà di linguaggio naturale senza aumentare le dimensioni del set di dati di addestramento, vogliamo anche utilizzare un approccio multi-task. Ciò significa che il set di dati dei droni verrà addestrato insieme a un set di dati fuori dominio".
Nelle prove iniziali, il componente di rilevamento delle collisioni del drone ha funzionato notevolmente bene, prevenire efficacemente collisioni sia con persone che con oggetti di grandi dimensioni nella maggior parte dei casi. Però, si è scoperto che ha difficoltà a rilevare mobili molto sottili o traslucidi. Per superare questo limite, il team sta ora progettando di creare un più preciso, mappa in tempo reale dell'ambiente circostante, come attualmente, il sistema basa le sue previsioni su una mappa 2-D preregistrata.
"La riduzione degli errori di posizione dovrebbe anche aiutare a migliorare il nostro tasso di successo totale della missione, poiché questa è stata una delle principali cause di fallimento della missione durante i nostri test, " hanno spiegato i ricercatori nel loro articolo. "L'altro problema emerso durante i nostri test è stato il sistema di percezione della profondità che funziona male in condizioni di luce molto luminose o mutevoli. Abbiamo in programma di affrontare anche questi problemi in futuro".
Inoltre, nei loro prossimi studi, i ricercatori vorrebbero migliorare la durata della batteria del sistema e la gestione della batteria, come al momento, può completare solo tre o quattro missioni prima di dover essere ricaricata. Alla fine vorrebbero aumentare questo numero in modo significativo, e allo stesso tempo escogitare nuove soluzioni che potrebbero aiutare a mitigare questo problema.
© 2019 Scienza X Rete