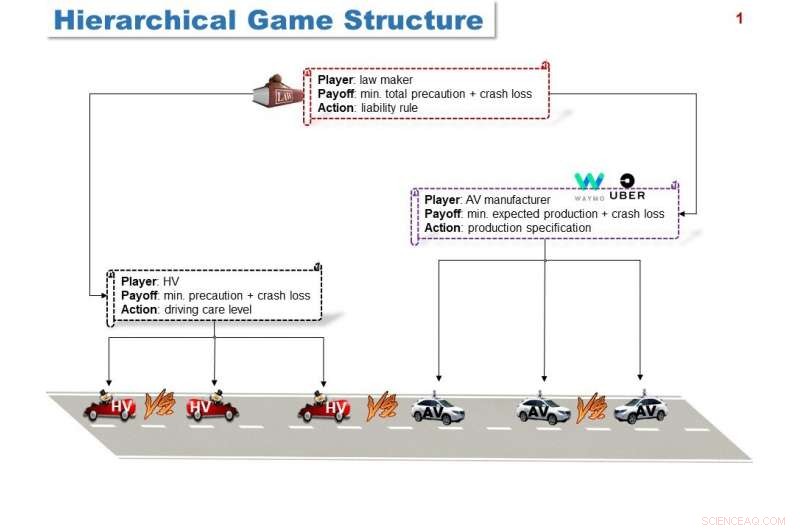
Struttura gerarchica del gioco, illustrando le interazioni strategiche gerarchiche a tre livelli tra il legislatore, il produttore dell'AV, AV, e HV sulle strade. Ogni giocatore ha obiettivi distinti o addirittura contrastanti, con l'obiettivo di selezionare una strategia per ottimizzare i suoi obiettivi. Credito:Sharon Di e Xu Chen/Columbia Engineering
Una recente decisione del National Transpiration Safety Board (NTSB) sull'incidente Uber del marzo 2018 che ha ucciso un pedone in Arizona ha diviso la colpa tra Uber, il veicolo autonomo dell'azienda (AV), il conducente della sicurezza nel veicolo, la vittima, e lo stato dell'Arizona. Con l'avvento delle auto a guida autonoma, i risultati dell'NTSB sollevano una serie di domande sull'incertezza nell'odierno sistema di responsabilità legale. In un incidente che coinvolge un AV e un conducente umano, chi è responsabile? Se entrambi sono responsabili, come dovrebbe essere ripartita la perdita per incidente tra di loro?
Gli AV rimuovono le persone dal compito pratico di guidare e quindi rappresentano una sfida complessa per l'odierna legge sulla responsabilità per incidenti, che punisce principalmente gli esseri umani. Gli esperti legali prevedono che, programmando algoritmi di guida, case automobilistiche a guida autonoma, compresi i progettisti di automobili, fornitori di sensori, sviluppatori di software, produttori di automobili, e parti correlate che contribuiscono alla progettazione, produzione, e test, avrà un'influenza diretta sul traffico. Mentre questi algoritmi rendono i produttori attori indispensabili, con la responsabilità del loro prodotto che potenzialmente gioca un ruolo critico, i responsabili politici non hanno ancora escogitato un metodo quantitativo per assegnare la perdita tra l'auto a guida autonoma e il guidatore umano.
Per affrontare questo problema, i ricercatori della Columbia Engineering e della Columbia Law School hanno sviluppato una norma di responsabilità congiunta basata sui guasti che può essere utilizzata per regolamentare sia i produttori di automobili a guida autonoma che i conducenti umani. Propongono un modello di teoria dei giochi che descrive le interazioni strategiche tra il legislatore, la casa automobilistica a guida autonoma, l'auto a guida autonoma, e conducenti umani, ed esaminare come, con l'aumentare della penetrazione nel mercato degli AV, la regola della responsabilità dovrebbe evolvere.
I loro risultati sono delineati in un nuovo studio che sarà presentato il 14 gennaio da Sharon Di, professore assistente di ingegneria civile e ingegneria meccanica, ed Eric Talley, Isidor e Siviglia Sulzbacher Professore di diritto, al 99° incontro annuale del Transportation Research Board a Washington, DC
Sebbene la maggior parte degli studi attuali si sia concentrata sulla progettazione degli algoritmi di guida degli AV in vari scenari per garantire l'efficienza e la sicurezza del traffico, non hanno esplorato l'adattamento comportamentale dei conducenti umani agli AV. Di e Talley si sono interrogati sull'effetto "azzardo morale" sugli esseri umani, sia con l'esposizione a un numero sempre maggiore di incontri con gli AV, le persone potrebbero essere meno inclini a prestare la "dovuta attenzione" di fronte agli AV sulla strada e guidare in modo più rischioso.
"I conducenti umani percepiscono gli AV come agenti intelligenti con la capacità di adattarsi a comportamenti di guida umani più aggressivi e potenzialmente pericolosi, "dice Di, che è un membro del Data Science Institute della Columbia. "Abbiamo scoperto che i conducenti umani possono trarre vantaggio da questa tecnologia guidando con noncuranza e correndo più rischi, perché sanno che le auto a guida autonoma sarebbero progettate per guidare in modo più conservativo".
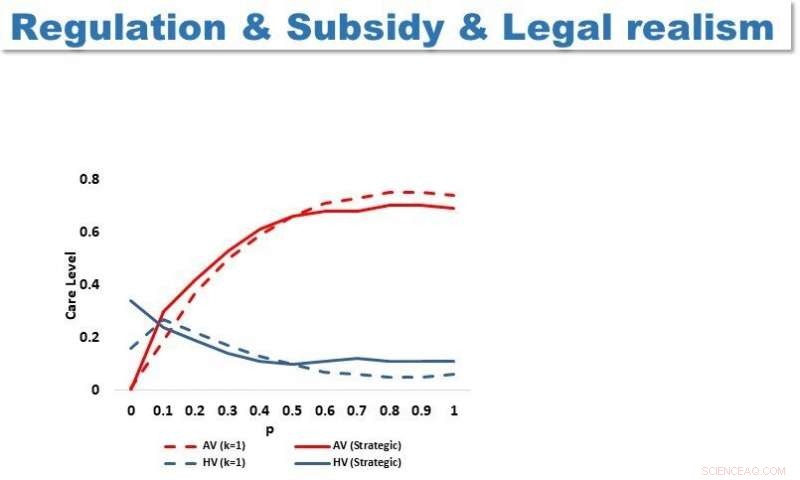
Il team ha scoperto che una politica di responsabilità progettata in modo ottimale è fondamentale per aiutare a prevenire lo sviluppo di rischi morali da parte dei conducenti umani e per assistere il produttore di AV con un compromesso tra sicurezza del traffico e costi di produzione. Credito:Sharon Di e Xu Chen/Columbia Engineering
I ricercatori hanno utilizzato la teoria dei giochi per modellare un mondo con giocatori interagenti che cercano di selezionare le proprie azioni per ottimizzare i propri obiettivi. I giocatori, i legislatori, produttori AV, AV, e conducenti umani:hanno obiettivi diversi nell'ecosistema dei trasporti. I legislatori vogliono regolamentare il traffico con maggiore efficienza e sicurezza, le case automobilistiche a guida autonoma sono orientate al profitto, e sia le auto a guida autonoma che i conducenti umani interagiscono sulle strade pubbliche e cercano di selezionare le migliori strategie di guida. Per catturare la complessa interazione tra tutti i giocatori, i ricercatori hanno applicato i metodi della teoria dei giochi per vedere su quale strategia ogni giocatore decide, in modo che altri non approfittino delle sue decisioni.
Il gioco gerarchico ha aiutato il team a comprendere l'azzardo morale dei conducenti umani (quanto rischio i conducenti potrebbero decidere di assumersi), l'impatto del produttore AV sulla sicurezza del traffico, e l'adattamento del legislatore al nuovo ecosistema dei trasporti. Hanno testato il gioco e il suo algoritmo su una serie di esempi numerici, offrendo approfondimenti sull'evoluzione comportamentale di AV e HV all'aumentare del tasso di penetrazione dell'AV e al variare dei costi o dei parametri ambientali.
Il team ha scoperto che una politica di responsabilità progettata in modo ottimale è fondamentale per aiutare a prevenire lo sviluppo di rischi morali da parte dei conducenti umani e per assistere il produttore di AV con un compromesso tra sicurezza del traffico e costi di produzione. I sussidi governativi ai produttori di AV per la riduzione dei costi di produzione incoraggerebbero notevolmente i produttori a produrre AV che superano sostanzialmente i conducenti umani e migliorano la sicurezza e l'efficienza complessiva del traffico. Inoltre, se i produttori AV non sono regolamentati in termini di specifiche della tecnologia AV o non sono adeguatamente sovvenzionati, I produttori di AV tendono ad essere puramente orientati al profitto e distruttivi per l'intero sistema di traffico.
"La tragica fatalità in Arizona che ha coinvolto un'automobile a guida autonoma ha suscitato un'enorme attenzione da parte del pubblico e dei responsabili politici su come tracciare le linee di responsabilità legale quando gli AV interagiscono con i conducenti umani, ciclisti, e pedoni, " Aggiunge Talley. "L'emergere degli AV introduce un tipo di incertezza particolarmente spinoso nello status quo, e uno che si ripercuote sulla produzione e sul design AV. La responsabilità legale per incidenti tra automobili e pedoni implica tipicamente un complesso calcolo di valutazioni comparate dei guasti per ciascuno dei gruppi summenzionati. L'introduzione di un veicolo autonomo può complicare ulteriormente le cose aggiungendo altre parti al mix, come i produttori di hardware e i programmatori di software. E la copertura assicurativa distorce ulteriormente le cose includendo parti interessate di terze parti. Ci auguriamo che i nostri strumenti analitici aiutino i responsabili delle politiche AV con le loro decisioni normative, e così facendo, contribuirà a mitigare l'incertezza nell'ambiente normativo esistente relativo alle tecnologie AV".
Di e Talley stanno ora esaminando più produttori di AV che si rivolgono a diversi mercati globali con diverse specifiche tecnologiche, rendere ancora più complesso lo sviluppo delle norme giuridiche.
"Sappiamo che i conducenti umani correranno più rischi e svilupperanno un rischio morale se pensano che il loro ambiente stradale sia diventato più sicuro, " Di nota. "È chiaro che una progettazione di regole di responsabilità ottimale è fondamentale per migliorare il benessere sociale e la sicurezza stradale con tecnologie di trasporto avanzate".