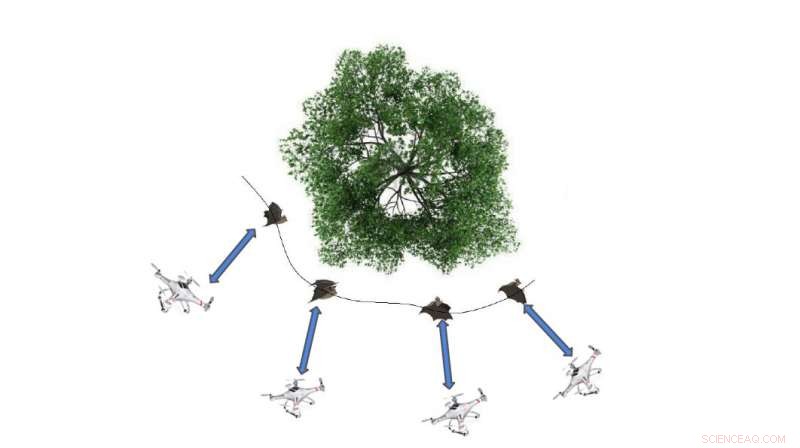
Un UAV quadrirotore che naviga su un albero, imitando il comportamento dei pipistrelli. Credito:Tanveer et al.
Negli ultimi anni, ricercatori di tutto il mondo hanno cercato di sviluppare tecniche computazionali che riproducano i comportamenti di esseri umani o animali in robot e macchine. Ciò comprende, ad esempio, la struttura e il funzionamento del cervello umano, la capacità di comunicazione dello sciame delle api, gli stili di locomozione di specifiche specie di pesci o anfibi, e altro ancora.
Basandosi sui risultati di studi precedenti, i ricercatori della Virginia Tech e dell'Università del Maryland hanno recentemente introdotto un framework di simulazione che potrebbe essere utilizzato per ricreare il comportamento dei pipistrelli negli UAV quadrirotore. Questo modello, presentato in un articolo pre-pubblicato su arXiv, nasce da una collaborazione tra Rolf Müller, un esperto di rilevamento biosonar, gli statistici Xiaowei Wu e Hongxiao Zhu, e informatico Pratap Tokekar, finanziato dalla National Science Foundation (NSF).
"La nostra idea generale era quella di costruire UAV in grado di ricreare il comportamento di un pipistrello durante la navigazione complessa, ambienti naturali, " Zhu ha detto a TechXplore. "In questo particolare studio, il nostro obiettivo principale era costruire un quadro computazionale per simulare gli ambienti di rilevamento dei pipistrelli e produrre segnali biosonar simulati per scopi di addestramento e test".
Il framework di simulazione sviluppato da Zhu e dai suoi colleghi consiste in un modello per simulare la geometria di foreste casuali con alberi e un modello che genera segnali biosonar. I segnali biosonar sono brevi suoni prodotti da pipistrelli e altri animali, comprese balene e delfini. Questi suoni generano echi che contengono preziose informazioni sull'ambiente circostante, aiutare gli animali nella loro navigazione, così come nei loro sforzi di caccia e foraggiamento.
Il primo componente del nuovo framework è un modello che fornisce informazioni dettagliate sugli ambienti casuali. Il secondo componente imita i meccanismi biologici che consentono la navigazione guidata dai biosonar nei pipistrelli, producendo echi simulati che contengono informazioni sui dintorni del robot.
L'approccio di simulazione ideato da Zhu e dai suoi colleghi ha diverse caratteristiche e vantaggi unici. Uno dei più notevoli è che consente di eseguire ripetutamente simulazioni casuali, quindi può produrre dati sensoriali ricchi che sarebbero più difficili da raccogliere utilizzando approcci sperimentali più tradizionali.
"Finora i principali successi della robotica sono stati limitati, ambienti strutturati come magazzini e ambienti industriali, "Tokekar, co-investigatore dello studio, ha detto a TechXplore. "C'è molto interesse nell'utilizzo di UAV in ambienti non strutturati come foreste e aree densamente vegetate. Solo per citare due esempi:DARPA ha recentemente concluso il suo Fast, leggero, Programma di autonomia, dove, come suggerisce lo stesso, l'enfasi era sugli UAV agili che operano in ambienti boschivi, mentre l'Army Research Lab ha annunciato un nuovo programma chiamato SARA con un obiettivo molto simile in mente".
Secondo Tokekar, la natura offre innumerevoli esempi di comportamenti che, se replicato artificialmente, potrebbe essere estremamente utile nelle applicazioni di robotica. Le capacità di navigazione assistita da biosonar osservate nei pipistrelli, su cui si concentra il loro studio, potrebbe specificamente aiutare a migliorare la navigazione e il rilevamento di oggetti nei robot volanti.
Nel futuro, la piattaforma di simulazione sviluppata da Zhu, Tokekar e i loro colleghi potrebbero essere usati per replicare questo particolare comportamento dei pipistrelli negli UAV quadrirotori autonomi. Inoltre, potrebbe aiutare i ricercatori a valutare e confrontare diversi algoritmi di navigazione ispirati ai pipistrelli all'interno di ambienti simulati.
"L'aspetto più significativo del nostro lavoro è che fornisce una comoda piattaforma per l'addestramento e il test di algoritmi robotici di ispirazione biologica per UAV, " Zhu ha detto. "Nei nostri prossimi studi, abbiamo in programma di addestrare e testare algoritmi robotici per diverse attività di navigazione utilizzando i dati Biosonar generati in questo framework".
© 2020 Scienza X Rete