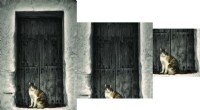
Immagine della configurazione sperimentale dei ricercatori, con un MAV in bilico sopra il plaid dove dovrebbe atterrare. Credito:Hagenaars et al.
Gli insetti volanti sono in grado di navigare nei loro ambienti in modo efficiente, elaborare gli stimoli visivi per evitare ostacoli e atterrare in sicurezza su una varietà di superfici. Negli ultimi dieci anni o giù di lì, i team di ricerca di tutto il mondo hanno cercato di replicare queste capacità nei microveicoli aerei autonomi (MAV) utilizzando meccanismi simili a quelli osservati negli insetti.
I ricercatori del MAVLab di TU Delft hanno cercato di sviluppare tecniche ispirate agli insetti che potrebbero migliorare le strategie di navigazione e atterraggio in piccoli droni ormai da diversi anni. In un recente articolo pre-pubblicato su arXiv, hanno introdotto una nuova strategia per la creazione di controllori neuromorfici che potrebbero migliorare gli atterraggi nei MAV.
"Al MAVLab di TU Delft, studiamo il volo autonomo di minuscoli droni, " Jesse Hagenaars, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Questa è una grande sfida, perché i nostri droni (a volte leggeri fino a 20 grammi) hanno risorse estremamente limitate in termini di energia, rilevamento ed elaborazione. Per questo ci ispiriamo molto alla natura, e in particolare, dagli insetti volanti".
Nei lavori precedenti, i ricercatori del MAVLab hanno sviluppato una serie di tecniche di ispirazione biologica per la stima del movimento basata sulla visione utilizzando le reti neurali di picco (SNN). Gli SNN sono una classe di reti neurali artificiali che imitano da vicino le reti neurali nel cervello umano, utilizzando picchi di attivazione per calcolare e analizzare le informazioni.
Nel loro nuovo studio, gli Hagenaar e i suoi colleghi volevano portare le loro tecniche un passo avanti, utilizzandoli per controllare il volo e l'atterraggio dei MAV. Per fare questo, hanno avviato una collaborazione con l'Istituto nazionale di ricerca olandese per l'informatica e la matematica (CWI), che ha un alto livello di esperienza nello sviluppo di reti neurali spiking.
"L'obiettivo finale della nostra ricerca è collegare la stima del movimento e il controllo per ottenere una pipeline completamente bio-ispirata, che sarà molto più efficiente in termini di spesa energetica rispetto ai tradizionali approcci di controllo basati sulla visione, " Hagenaars ha detto. "Per ora, per dimostrare la fattibilità della parte di controllo, abbiamo applicato il nostro approccio alle manovre di atterraggio."
La maggior parte delle tecniche sviluppate in precedenza per controllare i MAV durante l'atterraggio basato sulla visione si basa su controller proporzionali e ANN convenzionali. I controller basati su SNN hanno il potenziale per ottenere risultati simili o addirittura migliori con efficienze energetiche molto maggiori.
A differenza delle reti neurali artificiali convenzionali (ANN), in cui ogni singolo neurone trasmette un valore reale ad ogni passo temporale, Gli SNN emettono un picco binario solo quando ricevono una stimolazione sufficiente. Dato che ogni singolo picco o calcolo richiede una certa quantità di energia, Gli SNN tendono ad essere molto più efficienti dal punto di vista energetico rispetto alle ANN convenzionali, poiché sono generalmente implementati utilizzando ciò che è noto come "hardware neuromorfo".
"Anche se non abbiamo implementato i nostri controller di spiking su hardware neuromorfo, abbiamo fatto un passo avanti in termini di efficienza energetica, riducendo al minimo il numero di picchi utilizzati dalla rete per eseguire il controllo, "Hagenaars ha detto. "Questo è stato fatto includendo il numero di picchi come obiettivo durante l'ottimizzazione evolutiva dei controller."
Hagenaars e i suoi colleghi hanno addestrato i loro controller basati su SNN utilizzando strumenti di simulazione, e quindi valutato le loro prestazioni in ambienti del mondo reale. I loro esperimenti hanno prodotto risultati molto promettenti, con i controller che consentono atterraggi MAV rapidi e sicuri, mantenendo i picchi SNN e quindi il dispendio energetico al minimo.
interessante, i ricercatori hanno anche scoperto che i controller di picchi che producono meno picchi (cioè, spendere meno energia) si sono comportati altrettanto bene di altri che producono più picchi. Infatti, limitare il numero di picchi in arrivo sembrava semplificare il trasferimento delle capacità di atterraggio di un controller dagli ambienti simulati al mondo reale.
"Prima di tutto, questo lavoro è il primo a integrare le reti neurali di picco nel ciclo di controllo di un robot volante del mondo reale, " Hagenaars ha detto. "Secondo, riduciamo sostanzialmente al minimo il tasso di picco dei controller, che comporterebbe un notevole risparmio energetico se implementato su hardware neuromorfo. Oltre a rendere le reti di spiking il più piccole possibile, includiamo il tasso di picco della rete come obiettivo nell'evoluzione multi-obiettivo".
Hagenaars e i suoi colleghi della TU Delft sono stati tra i primi a utilizzare gli SNN per controllare i robot volanti negli ambienti del mondo reale. I controller che hanno creato potrebbero in definitiva aiutare i ricercatori ad aumentare le prestazioni e l'efficienza energetica dei MAV sia esistenti che di nuova concezione, soprattutto durante l'atterraggio.
"Il nostro recente documento si è concentrato solo sul controllo bioispirato basato su una data stima del movimento, " Hagenaars ha detto. "Il metodo effettivo per stimare questo movimento era, però, non molto bio-ispirato. Perciò, ora vogliamo combinare il nostro controller con il metodo di stima del movimento bio-ispirato (anch'esso basato su reti di spiking) sviluppato in precedenza dal MAVLab, per finire con una pipeline completamente bio-ispirata."
Finora, i ricercatori hanno testato i loro controller solo su chip convenzionali, tuttavia, i risparmi energetici previsti possono essere realizzati solo utilizzando hardware neuromorfo. Nel loro lavoro futuro, sperano quindi anche di implementarli su chip neuromorfici, come il chip Loihi di Intel.
© 2020 Scienza X Rete