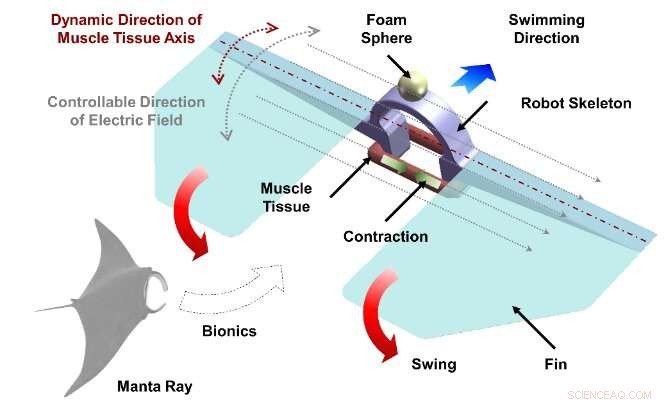
Questo nuotatore biosincretico era composto da una struttura scheletrica, due pinne, un attuatore vivente e una microsfera di bilanciamento della schiuma. Credito:Chuang Zhang, Shenyang Institute of Automation, Accademia cinese delle scienze
La natura ha fornito un grande supporto per lo sviluppo dei robot. Ispirato dalle mante, un team dello State Key Laboratory of Robotics presso lo Shenyang Institute of Automation, Accademia cinese delle scienze, ha sviluppato un robot per il nuoto bionico azionato da tessuto muscolare scheletrico coltivato e controllato da elettrodi circolari distribuiti (CDME) . Il robot può essere azionato in modo efficiente da un solo tessuto muscolare.
La biomimetica è uno dei metodi di ricerca robotica più importanti, in grado di migliorare le prestazioni cinematiche dei robot imitando la struttura e il comportamento degli organismi naturali. Il robot biosincretico, che utilizza materiali biologici naturali come elemento centrale, è l'ulteriore sviluppo della bionica.
Alcune cellule viventi sono state utilizzate per realizzare alcune funzioni dei robot, tra cui rilevamento, controllo e attuazione. Tuttavia, sono necessari metodi innovativi di propulsione e controllo per sviluppare ulteriormente le prestazioni di movimento controllabile dei robot biosincretici. Per risolvere questo problema, i ricercatori hanno proposto un metodo di controllo dinamico basato su CDME. La ricerca è stata pubblicata sulla rivista Cyborg and Bionic Systems .
Il team ha scoperto che il campo elettrico generato dal CDME era meno dannoso per il mezzo di coltura e le cellule rispetto agli elettrodi convenzionali. Utilizzando questo metodo, è possibile controllare dinamicamente la direzione del campo elettrico generato dall'elettrodo, mantenendolo parallelo al tessuto di guida del robot in tempo reale, garantendo così un controllo stabile del robot.
In primo luogo, il team ha progettato lo scheletro del robot basato sulla struttura della manta e ha utilizzato il polidimetilsilossano (PDMS) come materiale principale per la struttura. Allo stesso tempo, per facilitare l'assemblaggio del tessuto guida e della struttura del robot, i ricercatori hanno scelto il tessuto a forma di anello formato dai mioblasti come unità motrice del robot.
Inoltre, per ottenere tessuti muscolari circolari con contrattilità efficace, è stata utilizzata una stimolazione elettrica rotazionale dal CDME per realizzare un'induzione uniforme dei mioblasti da differenziare in miotubi. Per consentire al robot di nuotare alla velocità desiderata, è stata misurata la contrattilità del tessuto muscolare prima dell'assemblaggio con la struttura del nuotatore. Il team di ricerca ha anche utilizzato metodi di simulazione per analizzare la relazione tra le prestazioni di movimento del robot e la forza di contrazione dei tessuti motrici.
Infine, per dimostrare il movimento stabile e controllabile del robot biosincretico proposto, i ricercatori hanno realizzato il nuoto controllabile del robot a diverse velocità utilizzando il metodo di stimolazione elettrica dinamica proposto. Nell'esperimento, il robot ha dimostrato un nuoto efficace e una controllabilità stabile, che ha verificato l'efficacia del design biomimetico e del metodo di controllo basato su CDME proposto dal team di ricerca.
La progettazione biomimetica e il metodo di controllo dell'attuazione proposti in questo studio non solo promuovono l'ulteriore sviluppo di robot biosincretici, ma hanno anche un certo significato guida per la progettazione biomimetica di robot morbidi, ingegneria dei tessuti muscolari e altri campi correlati.
Tuttavia, sebbene gli attuali robot biosincretici abbiano raggiunto un movimento controllato efficace, ci sono ancora molti colli di bottiglia chiave che devono essere superati. Ad esempio, la maggior parte dei robot ha una dimensione di centimetri, il che è difficile per applicazioni come la somministrazione di farmaci in vivo.
Le tecnologie, tra cui la stampa 3D e la manipolazione flessibile orientata a strutture micro-nano biologiche, sono fondamentali per lo sviluppo di micro-robot biosincretici per applicazioni cliniche e altri ambienti speciali. Inoltre, la maggior parte dei robot bio-sincretici esistenti si basa su stimoli artificiali esterni per ottenere movimenti controllati, che potrebbero mancare di autonomia. Pertanto, il metodo di rilevamento e controllo basato su cellule viventi può essere applicato alla ricerca di robot bio-sincretici al fine di realizzare movimenti robotici autonomi basati su informazioni ambientali. + Esplora ulteriormente