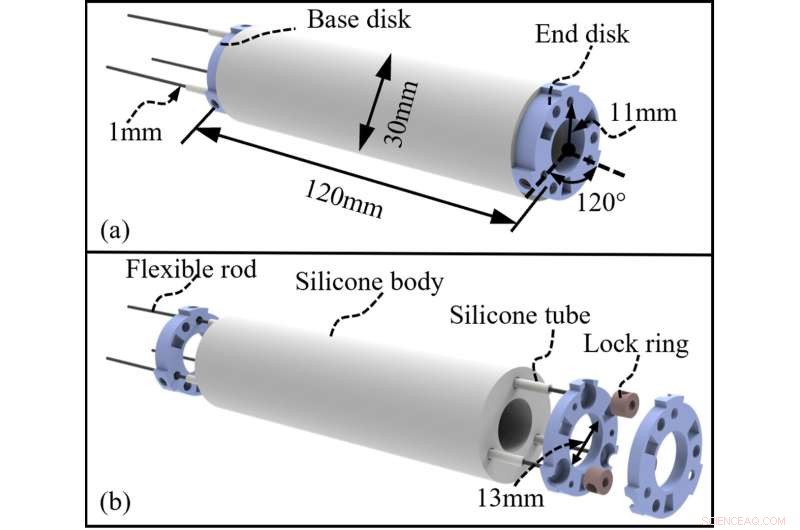
Struttura del braccio morbido azionato da stelo. (a) Panoramica del progetto. (b) Vista esplosa. Credito:Wang et al.
I robot morbidi in grado di completare compiti con elevata efficienza, accuratezza e precisione potrebbero avere numerose applicazioni preziose. Ad esempio, potrebbero essere introdotti in contesti medici, aiutando i medici a svolgere procedure chirurgiche complesse o assistendo pazienti anziani e vulnerabili durante la riabilitazione.
I robot morbidi sono più flessibili e possono deformarsi di più. Ciò può comportare una maggiore destrezza (vale a dire, migliori capacità manuali durante il completamento delle attività), nonché una riduzione del carico utile (vale a dire, la capacità del robot di trasportare un carico), perché possono produrre forze minori rispetto ai sistemi robotici rigidi
I ricercatori dell'Università Nazionale di Singapore e dell'Università Jiaotong di Pechino hanno recentemente sviluppato un nuovo robot morbido azionato da stelo (RDSR) che opera attraverso movimenti di spinta e trazione. Questo robot, presentato in un documento pubblicato nelle IEEE Robotics and Automation Letters , combina i meccanismi di due sistemi robotici precedentemente creati dai membri del gruppo di ricerca.
"Una prestazione ben bilanciata in termini di destrezza, precisione e carico utile potrebbe avere un grande potenziale nelle applicazioni di robot morbidi", ha detto a TechXplore Cecilia Laschi, una delle ricercatrici che hanno condotto lo studio. "Molti studi si stanno concentrando su quest'area e alcuni lavori e risultati precedenti ci hanno ispirato. Ad esempio, in una ricerca pionieristica pubblicata su Scienza e ingegneria dei materiali, abbiamo sviluppato un robot morbido ispirato al polpo, guidato da tendini longitudinali e trasversali, allo stesso modo ai muscoli del polpo."
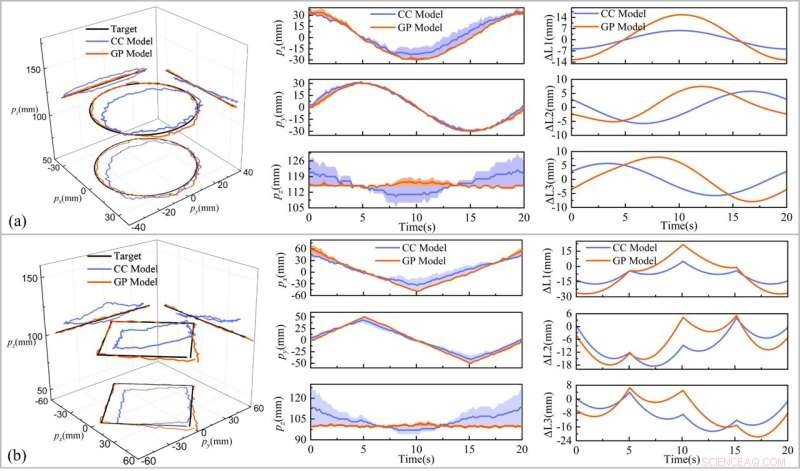
Prestazioni di tracciamento della traiettoria del controllo ad anello aperto basato sul modello CC e GP. (a) Caso per percorso circolare. (b) Caso per percorso quadrato. Credito:Wang et al.
Il precedente robot creato da Laschi e dai suoi colleghi dell'Istituto di BioRobotica della Scuola Superiore Sant'Anna in Italia può emulare il modo in cui un polpo si muove allungando, accorciando e piegando i suoi tentacoli. Il loro sistema di nuova concezione potrebbe essere particolarmente promettente per completare missioni in spazi ristretti, come pulire o esplorare, accedere a cavità profonde e intervenire all'interno del corpo umano.
"Il secondo studio che ha ispirato il nostro recente lavoro è stato lo sviluppo da parte del mio team di ricerca di un robot continuo basato su aste flessibili push-pull", ha spiegato Peiyi Wang, un altro ricercatore coinvolto nello studio. "Combinando il puro corpo morbido del nostro sistema ispirato al polpo e il braccio a stelo del robot di Wang, il nostro nuovo robot mira a ottenere prestazioni equilibrate in termini di precisione del movimento, spazio di lavoro, DOF, rigidità e forza di uscita attiva."
Il nuovo robot creato da Laschi, Wang e dai loro colleghi è costituito da un corpo morbido in silicone, una base rigida, dischi terminali e tre tubi di silicio che ospitano ciascuno un'asta flessibile a base di Nitinol (NiTi). Il corpo in silicone, integrato tra la base e il disco terminale, è molto morbido e flessibile, quindi può essere facilmente allungato, accorciato e piegato.
"Ciascuna delle aste flessibili del nostro sistema può essere controllata in entrambe le direzioni di spinta e trazione, il che è diverso dai tendini con la sola azione di trazione", ha detto Wang. "Il robot soft rod-driven (RDSR) può quindi realizzare più movimenti in qualsiasi direzione (più DOF), attraverso il controllo coordinato di tre aste push-pull."
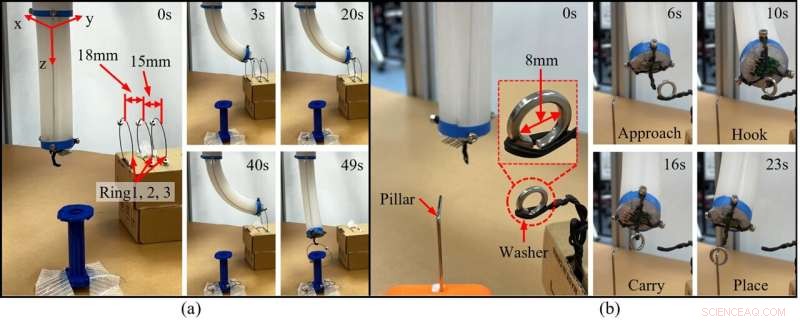
Manipolazioni di oggetti eseguite dal nostro robot morbido. RDSR ha completato le attività di pick-and-place con operazioni precise su un ampio spazio di lavoro. (a) Gli oggetti sono stati posizionati vicino al confine dell'area di lavoro (attività 1). (b) È stato posizionato un oggetto con un piccolo diametro di 8 mm (attività 2). Credito:Wang et al.
I ricercatori hanno valutato il loro RDSR in una serie di test, confrontando le sue prestazioni con quelle di un robot morbido a base di silicone (TDSR). Hanno scoperto che il loro nuovo sistema robotico era più rigido e poteva funzionare all'interno di uno spazio di lavoro più ampio (da 2,6 a 5,2 volte più grande).
In contrasto con il TDSR, lo hanno anche confrontato, il loro robot potrebbe applicare attivamente forze di spinta perpendicolari su un piano inclinato e potrebbe anche completare compiti che implicano la manipolazione di oggetti. Insieme, tutti questi risultati suggeriscono che il nuovo robot potrebbe essere più efficace nel completare compiti che comportano la raccolta e il posizionamento di oggetti all'interno di spazi più ampi e con alti livelli di precisione.
"Il movimento ottenuto con azionamento bidirezionale push-pull è originale", ha detto Laschi. "Dà al robot morbido un controllo più accurato. Un'implicazione notevole del nostro lavoro è il suo potenziale per consentire prestazioni equilibrate in termini di destrezza, precisione e carico utile."
In futuro, il nuovo sistema RDSR creato da questo team di ricercatori potrebbe aiutare ad affrontare compiti complessi in modo più efficiente e affidabile, raggiungendo livelli di precisione più elevati. Nei loro prossimi studi, Laschi e i suoi colleghi vorrebbero testare l'efficacia dei robot per applicazioni biomediche, tra cui chirurgia, riabilitazione e assistenza agli anziani.
"Abbiamo in programma di migliorare il braccio morbido che abbiamo creato anche su altri aspetti che non sono strettamente legati al design e alla meccanica, ma al controllo dei suoi movimenti", ha aggiunto Laschi. "L'aggiunta e la modellazione della propriocezione distribuita, ovvero la percezione della postura del braccio, è una sfida da affrontare, così come un robusto sistema di rilevamento per rilevare le forze di contatto". + Esplora ulteriormente
© 2022 Rete Science X