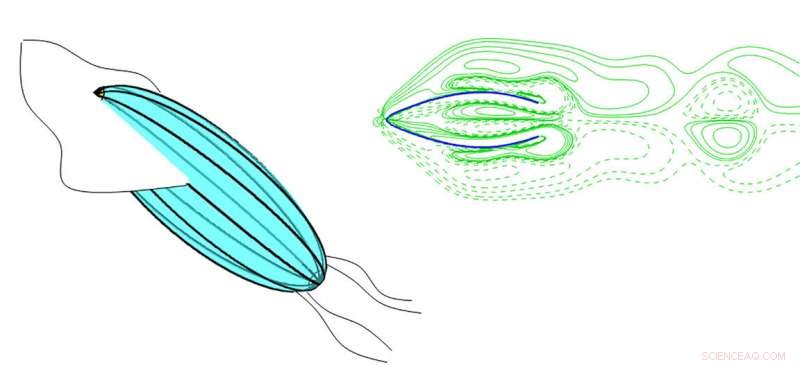
Xiaobo Bi e Qiang Zhu discutono del loro lavoro sviluppando un robot acquatico ispirato ai cefalopodi. (Sinistra) Robot immaginato ispirato al calamaro che combina il battito delle pinne e il getto per la locomozione. (A destra) Le simulazioni numeriche forniscono informazioni sui meccanismi fisici sottostanti. Attestazione:Qiang Zhu
Ispirato dalla strategia di nuoto unica ed efficiente dei cefalopodi, gli scienziati hanno sviluppato un robot acquatico che imita la loro forma di propulsione.
Questi ad alta velocità, i robot simili a calamari sono fatti di materiali intelligenti, che li rendono difficili da rilevare, un vantaggio che ha potenziali applicazioni scientifiche e di ricognizione militare, pur mantenendo un basso impatto ambientale.
I fisici Xiaobo Bi e Qiang Zhu hanno utilizzato simulazioni numeriche per illustrare i meccanismi fisici e la meccanica dei fluidi del metodo di nuoto di un calamaro, che utilizza raffiche intermittenti attraverso la propulsione a getto pulsato. Usando questa forma di locomozione, il nuovo dispositivo può raggiungere velocità impressionanti, proprio come la sua ispirazione animale. Bi e Zhu discutono del loro lavoro in questa settimana Fisica dei fluidi .
Quando nuoti, queste macchine simili a calamari aspirano l'acqua in una camera a pressione e poi la espellono. Il dispositivo dal corpo morbido potrebbe essere utilizzato come piattaforma per il monitoraggio ambientale utilizzando contemporaneamente questa funzione per testare campioni d'acqua mentre nuota.
"Oltre alle simulazioni numeriche 2-D e 3-D presentate in questo articolo, stiamo lavorando con un team interdisciplinare per costruire un prototipo del dispositivo meccanico, per eseguire sia il nuoto in linea retta che le manovre, " Zhu ha detto. "Questo progetto unirà fluidodinamica, controllo, materiali intelligenti e design robotico."
Il dispositivo potrebbe essere utilizzato come nuotatore autonomo o come elica di un veicolo subacqueo.
I ricercatori non sono ancora stati in grado di mantenere velocità che possono durare per più di qualche ciclo a causa di turbolenze e instabilità, ma stanno lavorando su modi per superare questo. Zhu spera che questa ricerca fornisca un punto di partenza per modelli più sofisticati e studi sperimentali per sviluppare robot come la loro creazione.