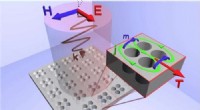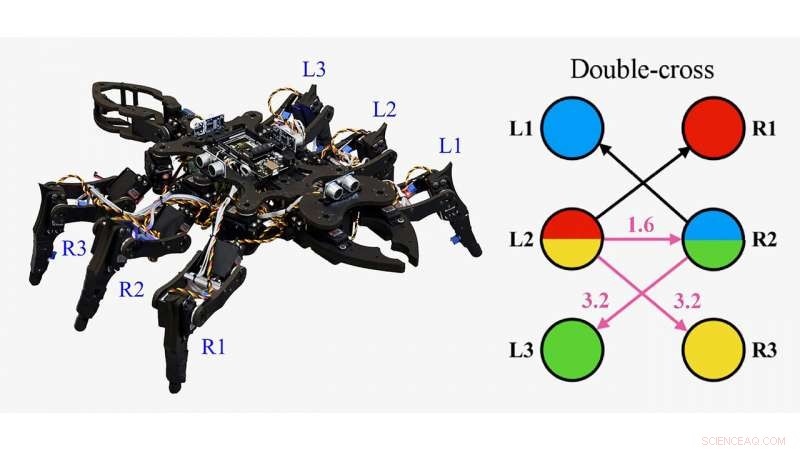
I ricercatori in Giappone e in Italia stanno abbracciando il caos e la fisica non lineare per creare andature simili a insetti per piccoli robot, completi di un controller di locomozione per fornire un'interfaccia cervello-macchina. Vista del loro robot sperimentale e schemi di accoppiamento per le sue andature. Credito:Ludovico Minati
I ricercatori in Giappone e in Italia stanno abbracciando il caos e la fisica non lineare per creare andature simili a insetti per piccoli robot, completi di un controller di locomozione per fornire un'interfaccia cervello-macchina.
La biologia e la fisica sono permeate da fenomeni universali fondamentalmente radicati nella fisica non lineare, e ha ispirato il lavoro dei ricercatori.
Nel diario Caos , il gruppo descrive utilizzando il sistema Rössler, un sistema di tre equazioni differenziali non lineari, come elemento costitutivo per generatori di pattern centrali (CPG) per controllare l'andatura di un insetto robotico.
"La natura universale dei fenomeni sottostanti ci ha permesso di dimostrare che la locomozione può essere ottenuta tramite combinazioni elementari di sistemi Rössler, che rappresentano una pietra miliare nella storia dei sistemi caotici, " disse Ludovico Minati, del Tokyo Institute of Technology e dell'Università di Trento.
I fenomeni legati alla sincronizzazione consentono al gruppo di creare reti molto semplici che generano schemi ritmici complessi.
"Queste reti, CPG, sono la base della locomozione con le gambe ovunque in natura, " Egli ha detto.
I ricercatori hanno iniziato con una rete minimalista in cui ogni istanza è associata a una gamba. La modifica dell'andatura o la creazione di una nuova può essere eseguita semplicemente apportando piccole modifiche all'accoppiamento e ai ritardi associati.
In altre parole, l'irregolarità può essere aggiunta rendendo più caotici i singoli sistemi o l'intera rete. Per i sistemi non lineari, un cambiamento di output non è proporzionale a un cambiamento di input.
Questo lavoro mostra che il sistema Rössler, al di là delle sue molte proprietà interessanti e intricate, "può anche essere usato con successo come substrato per costruire un controller di locomozione bioispirato per un robot insetto, " ha detto Minati.
Il loro controller è costruito con un elettroencefalogramma per abilitare un'interfaccia cervello-computer.
"L'attività neuroelettrica di una persona viene registrata e vengono utilizzati concetti non lineari di sincronizzazione di fase per estrarre uno schema, " ha detto Minati. "Questo modello viene quindi utilizzato come base per influenzare la dinamica dei sistemi Rössler, che generano il modello di camminata per il robot insetto."
I ricercatori attingono due volte alle idee fondamentali della dinamica non lineare.
"Primo, li usiamo per decodificare l'attività biologica, poi nella direzione opposta per generare attività bioispirata, " Egli ha detto.
L'implicazione chiave di questo lavoro è che "dimostra la generalità dei concetti dinamici non lineari come la capacità del sistema Rössler, che viene spesso studiato in uno scenario astratto, "Minati ha detto "ma è usato qui come base per generare modelli biologicamente plausibili".