Fig. Influenza della non linearità FM sui risultati di range. Credito:XIOPM
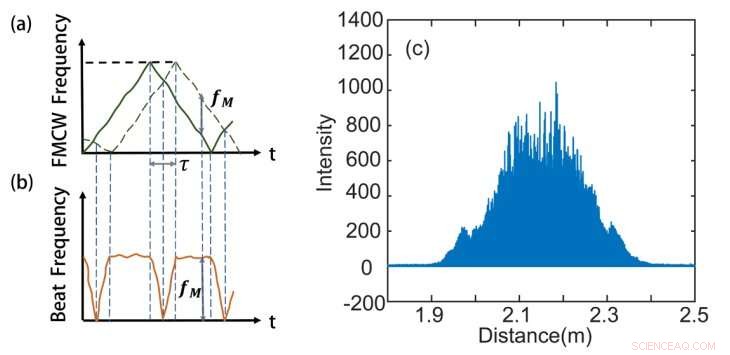
Light Detection And Ranging (LiDAR) è ben noto in quanto offre un'elevata precisione di portata, e mostra prospettive promettenti nei veicoli autonomi e in vari campi. La gamma LiDAR tradizionale a onda continua modulata in frequenza (FMCW) si basa sul rilevamento dell'eterodina, calcolo della distanza sconosciuta estraendo la frequenza del segnale di interferenza. Però, tale tecnica soffre di non linearità della modulazione di frequenza (FM), che porta a risultati imprecisi.
A causa della relazione non lineare tra la lunghezza d'onda del laser e la corrente di iniezione, lo spettro del segnale di battimento viene ampliato sebbene il laser emetta un segnale triangolare.
Per risolvere il problema, un gruppo di ricerca guidato dal prof. Zhang Wenfu dell'Istituto di ottica e meccanica di precisione di Xi'an (XIOPM) dell'Accademia cinese delle scienze (CAS) ha proposto un nuovo approccio che campiona i segnali di intervallo a intervalli di frequenza uguali utilizzando un pettine solitonico microrisonatore. I risultati sono stati pubblicati in Lettere di ottica .
Nel nuovo sistema, non è richiesta una frequenza di battitura accurata in modo che la fase di elaborazione dei dati sia notevolmente semplificata. Anziché, la distanza incognita è data dalla relazione lineare tra l'intervallo di frequenza misurato e la corrispondente fase del segnale di range.
Per di più, grazie alle caratteristiche di frequenza stabile del pettine solitonico garantiscono un campionamento accurato, il sistema è quasi impermeabile alle interferenze esterne. Il percorso ottico del sistema è pressoché inalterato dalla temperatura e dall'umidità dell'ambiente poiché non è stata utilizzata la fibra ottica lunga.
L'esperimento mostra che l'errore di distanza è inferiore a 20 μm a una distanza di misurazione di 2 metri, il risultato promettente ei vantaggi sopra descritti indicano che l'approccio proposto ha un forte potenziale applicativo nella produzione di precisione.