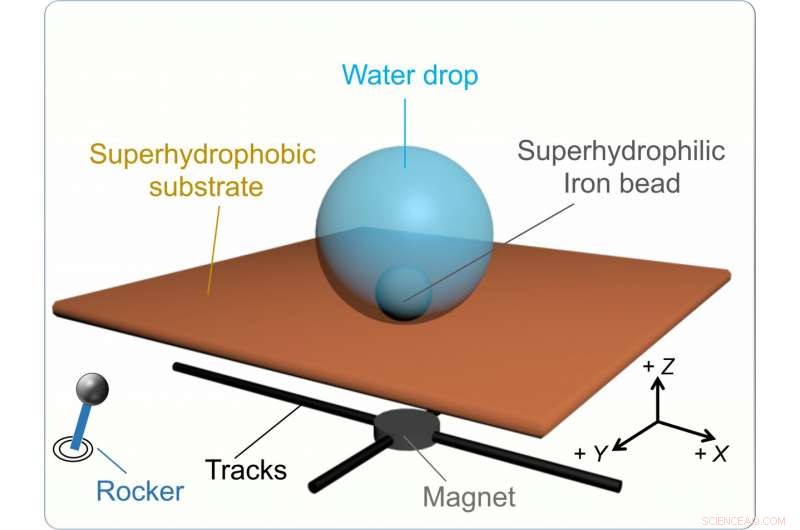
Un'illustrazione schematica di Hydrobot azionato magneticamente su una superficie superidrofobica. Credito:Yifan Si
Usando un pezzo di magnete, i ricercatori hanno progettato un semplice sistema in grado di controllare il movimento di una piccola pozza d'acqua, anche quando è capovolto. La nuova strategia di manipolazione dei liquidi, descritto nel giornale Cell Report Scienze fisiche il 3 giugno può avere un'ampia gamma di applicazioni, tra cui la pulizia di ambienti difficili da raggiungere o la consegna di piccoli oggetti.
I precedenti tentativi di controllare il movimento dei fluidi si basavano spesso su piattaforme speciali. Per esempio, su una superficie che ha una sezione più idrofoba di un'altra, l'acqua si allontanerà spontaneamente dall'area e scorrerà verso il lato più idrofilo. Gli scienziati hanno anche utilizzato stimoli esterni come il calore o la luce per dirigere il movimento dei liquidi. Ma i fluidi in questi sistemi tendono a muoversi a bassa velocità, e non possono fermarsi a caso durante il processo. Inoltre, questi approcci di solito richiedono materiali e strumenti difficili da ottenere, quindi sono per lo più limitati all'uso in laboratorio.
Yifan Si, il primo autore del documento e un borsista post-dottorato presso la City University di Hong Kong, ha progettato un nuovo dispositivo con il suo team che utilizzava una minuscola perlina di ferro con una superficie estremamente idrofila. Quando viene messo in una goccia d'acqua, il tallone, che misura circa 1 millimetro di diametro, attirerà l'acqua per avvolgerlo.
Il team ha chiamato la perla avvolta d'acqua Hydrobot, e lo mettono su una superficie estremamente idrofoba. Utilizzando un pezzo di magnete posto sotto la superficie, i ricercatori hanno guidato la perla idrofila, così come la goccia d'acqua vi aderiva, muoversi in tutte le direzioni e fermarsi in qualsiasi momento. Il tallone potrebbe muoversi a una velocità di 2 metri al secondo senza perdere l'acqua bloccata sulla sua superficie.
"L'idea di Hydrobot è stata ispirata da piccoli pesci che rimbalzano sulle foglie di loto, " Si dice. "Abbiamo uno stagno nel campus con molte piante di loto, e di tanto in tanto vedevo i pesci rimanere intrappolati su questi grandi, foglie idrofobiche. Quando riescono a scappare e a saltare di nuovo nello stagno, anche la pozza d'acqua intorno al pesce sulle foglie sarà portata via".
Le squame dei pesci sono altamente idrofile e possono aderire strettamente all'acqua, soprattutto su una superficie idrofoba. Ispirato da questo fenomeno naturale, Si e il suo team hanno progettato Hydrobot.
Mentre il tallone da 1 millimetro poteva trasportare solo una gocciolina, La capacità di Hydrobot può migliorare aumentando la superficie del tallone. I ricercatori hanno sperimentato con una perlina di 2 millimetri e hanno scoperto che poteva manipolare fino a 1 millilitro di acqua, delle dimensioni di una piccola pozzanghera, per seguire il movimento del magnete esterno.
"Un vantaggio di Hydrobot è che i materiali coinvolti sono facilmente accessibili. Se un'attività richiede il controllo di una maggiore quantità di acqua, possiamo semplicemente usare più perline per aumentare la superficie, "Si dice.
Il team ha anche testato Hydrobot capovolto posizionando la goccia d'acqua e la perlina sotto la superficie e il magnete in alto. Il magnete sopra la superficie è riuscito ad attirare la perlina di ferro, e l'elevata forza di adesione superficiale tra tallone e acqua ha impedito alla goccia di cadere, nonostante la gravità. Nel sistema invertito, Hydrobot potrebbe ancora muoversi a una velocità di 2 centimetri al secondo.
Poiché Hydrobot può essere controllato con precisione, il team propone che il dispositivo possa essere utilizzato per raccogliere la polvere e pulire le superfici. Hanno condotto un esperimento concettuale in cui il team ha spruzzato polvere di colore blu su una superficie estremamente idrofoba. Hydrobot si è girato, seguendo il movimento del magnete sottostante, per raccogliere tutti i granelli di polvere. Infine, Hydrobot ha pulito la superficie senza danni ed è tornato al punto di partenza.
Finora, Hydrobot richiede una superficie a bassa adesione per funzionare, come quello superidrofobico utilizzato negli esperimenti. Questo limita dove il dispositivo può essere utilizzato, ma il team prevede di esplorare ulteriormente altre applicazioni del mondo reale.
"Hydrobot può offrire alcune nuove idee per la progettazione di robot morbidi, " Si dice. "Attualmente, la maggior parte dei robot morbidi utilizza materiali solidi. Anche se sono flessibili, non sarebbero flessibili come i liquidi. I liquidi hanno anche caratteristiche che possono essere vantaggiose, compresa la loro capacità di cambiare forma e vaporizzare. Con più studi, queste caratteristiche possono rendere Hydrobot ancora più versatile."