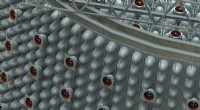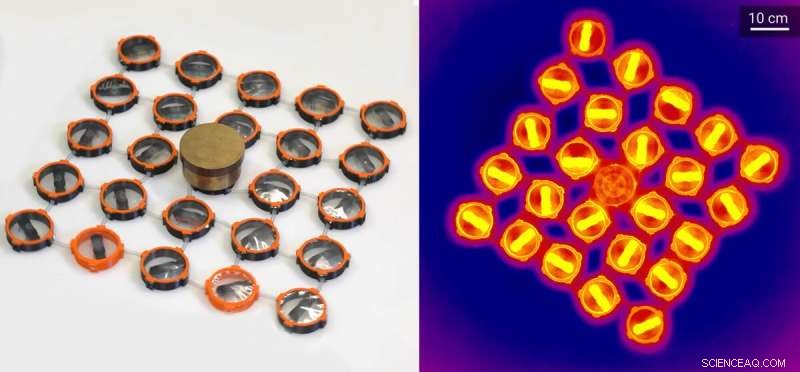
Attuazione collettiva all'interno di una rete elastica di hexbugs. Credito:ESPCI Parigi
La fisica del moto collettivo è stata ben studiata negli ultimi trent'anni. Finora gli scienziati si sono concentrati sullo studio dei movimenti "fluidi", come quelli degli stormi di uccelli o dei banchi di pesci. Ora, utilizzando un ingegnoso dispositivo sperimentale, i ricercatori del laboratorio Gulliver (ESPCI Paris-PSL / CNRS) hanno rivelato la possibilità di movimenti collettivi in strutture solide elastiche. Il loro lavoro fa luce sul meccanismo e sui parametri che controllano questa cosiddetta "attuazione collettiva". Questo lavoro è pubblicato sulla rivista Nature Physics .
All'interno del laboratorio Gulliver, il team di Olivier Dauchot, ricercatore del CNRS, studia da diversi anni i movimenti collettivi. Inizialmente si è concentrato su una semplice domanda:come riprodurre in laboratorio i movimenti collettivi osservati in natura, come quelli degli uccelli o dei pesci? Per fare ciò, il team ha avviato esperimenti con la "materia attiva", ovvero la materia le cui entità elementari si muovono autonomamente:grani ambulanti, vasche per nuotare, mini-robot, un vero e proprio zoo di sistemi attivi (ma non viventi), con i quali sono stati in grado di riprodurre e studiare i movimenti collettivi. Di recente, la loro ricerca si è concentrata sui fenomeni degli ingorghi quando il sistema diventa più denso. Da fluido, il sistema diventa gradualmente solido. È possibile un movimento collettivo all'interno di un solido attivo?
Ingredienti semplici per comprendere un sistema complicato
"Come particelle attive, abbiamo optato per Hexbugs. Si tratta di piccoli robot motorizzati, che si possono trovare nei negozi. Come materiale elastico solido, abbiamo realizzato una rete di cilindri collegati tra loro da molle. Posizionando un Hexbug in ciascuno dei cilindri che costituiamo la rete, formiamo un solido attivo", spiega Paul Baconnier, che sta svolgendo la sua tesi su questo tema. Ogni Hexbug deforma la rete cercando di muoversi, pur essendo soggetto agli spostamenti indotti dagli sforzi dei suoi vicini. Sorprendentemente, è possibile in determinate condizioni che un movimento collettivo sincronizzato emerga da questo tiro alla fune.
Quando il solido attivo viene semplicemente posizionato sul pavimento, gli Hexbug si allineano spontaneamente e l'intero solido inizia a muoversi attraverso il laboratorio. E se agganciassimo il solido per i suoi bordi? In questo caso si osserva un nuovo tipo di moto collettivo all'interno del solido:tutti gli elementi della rete oscillano in modo periodico e sincronizzato attorno alla loro posizione di equilibrio.
Per spiegare questo fenomeno di "attuazione collettiva", i ricercatori hanno variato i parametri dell'esperimento, come la rigidità delle molle o la forma della rete. Hanno mostrato che l'attuazione collettiva risulta dalla combinazione dell'attività degli Hexbug e dell'elasticità dei collegamenti di rete, che consente alla struttura di deformarsi e ad ogni Hexbug di orientarsi in risposta a questa deformazione. Il team ha modellato e riprodotto numericamente i comportamenti osservati, anche in sistemi con diverse migliaia di agenti attivi. Questa attivazione collettiva spontanea ricorda i movimenti osservati in alcune dinamiche cellulari, in particolare in alcuni tessuti cutanei, che potrebbero quindi essere meglio compresi alla luce di questo lavoro. + Esplora ulteriormente