Mostrato a velocità 4x, un microrobot a forma di fiore si avvicina a perline di plastica, usa forze capillari per attaccarli a uno dei suoi petali, quindi li rilascia nella posizione desiderata ruotando sul posto. Credito:Penn Engineering
A scala microscopica, raccolta, collocazione, raccolta, e organizzare gli oggetti è una sfida persistente. I progressi nella nanotecnologia significano che ci sono cose sempre più complesse che vorremmo costruire a quelle dimensioni, ma mancano gli strumenti per spostare le loro parti componenti.
Una nuova ricerca della School of Engineering and Applied Science mostra quanto sia semplice, robot microscopici, pilotato a distanza da campi magnetici, può usare le forze capillari per manipolare oggetti che galleggiano su un'interfaccia olio-acqua. Questo sistema è stato dimostrato in uno studio pubblicato sulla rivista Lettere di fisica applicata .
Lo studio è stato condotto da Kathleen Stebe, Richer &Elizabeth Goodwin Professore nel Dipartimento di Ingegneria Chimica e Biomolecolare della Penn Engineering, e Tianyi Yao, uno studente laureato nel suo laboratorio. Nicholas Chisholm, un ricercatore post-dottorato nel laboratorio di Stebe, e Edward Steager, un ricercatore nel laboratorio GRASP di Penn Engineering ha contribuito alla ricerca.
I microrobot nello studio del team Penn sono sottili fette di magnete, circa un terzo di millimetro di diametro. Pur non avendo parti mobili o sensori propri, i ricercatori li chiamano robot per la loro capacità di raccogliere e posizionare oggetti arbitrari che sono anche più piccoli di loro.
Questa capacità è una funzione dell'ambiente specializzato in cui lavorano questi microrobot:all'interfaccia tra due liquidi. In questo studio, l'interfaccia è tra acqua ed esadecano, un olio comune. Una volta lì, i robot deformano la forma di quell'interfaccia, essenzialmente circondandosi di un invisibile "campo di forza" di interazioni capillari.
Le stesse forze capillari che attirano l'acqua dalle radici di un albero alle sue foglie vengono qui utilizzate per attirare le microparticelle di plastica a contatto con il robot, o altre particelle già attaccate ai suoi bordi.
"Abbiamo usato queste forze capillari per assemblare le cose prima, ma ora i robot e le particelle sono molto più leggeri e di qualche ordine di grandezza più piccoli di diametro, " dice Stebe. "Quando scendi alla scala dei micron, significa che un diverso tipo di fisica governa le distorsioni. Raccogliere e organizzare oggetti di poche decine di micron è un bel risultato, e non qualcosa che saremo in grado di fare a mano."
Lo studio ha dimostrato la fisica che governa le interazioni tra questi micro-robot e le particelle di plastica che avevano il compito di manipolare.
"Nel passato, "Stebe dice, "abbiamo preso oggetti statici e creato distorsioni intorno a loro, ha poi mostrato come le particelle fossero attratte dalle regioni ad "alta curvatura" di quelle distorsioni. Ora, invece di un oggetto statico, abbiamo un magnete che funge da fonte di distorsione mobile."
"Questo rende le cose più complicate, " Dice Chisholm. "Mentre il robot si muove verso le particelle, crea un campo di flusso che allontana le particelle, quindi ora c'è la repulsione idrodinamica e l'attrazione capillare che interagiscono. Le particelle seguono il minimo di energia, il che potrebbe significare muoversi in salita."
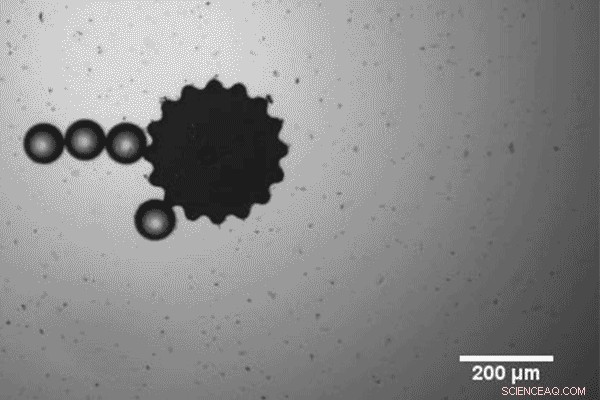
Con un robot di forma quadrata, i ricercatori hanno visto che una volta che hanno ottenuto particelle sulla cresta della deformazione, erano fortemente attratti dagli angoli. Questa è una proprietà potenzialmente utile, poiché i robot potrebbero avvicinarsi ai loro obiettivi da un'ampia gamma di angoli e orientamenti e comunque finire con la particella in una posizione prevedibile.
"Abbiamo dimostrato che quando cambi la forma del robot, cambi il tipo e la forza delle interazioni, " Dice Stebe. "Gli angoli acuti trattengono le particelle come una morte cupa, ma quando ammorbidiamo gli angoli, possiamo semplicemente dare un giro ai robot per rilasciarli."
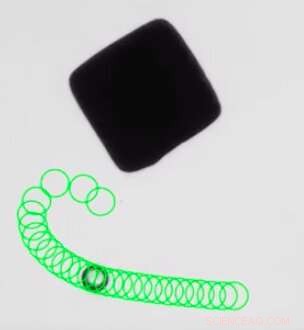
Le particelle sono fortemente attratte dagli angoli dei robot di forma quadrata. Il contorno verde mostra la traiettoria che la particella prende quando il robot si avvicina. Credito:Università della Pennsylvania
Oltre a un quadrato dagli angoli morbidi, i ricercatori hanno anche sperimentato con un robot rotondo, così come uno a forma di fiore. Tutti avevano il vantaggio aggiuntivo di poter rilasciare con precisione il carico ruotando sul posto, con i "petali" del robot a forma di fiore che forniscono il controllo più preciso sulla posizione di una particella di carico.
Finalmente, il team ha dimostrato una docking station. Composto da un pezzo statico di plastica ondulata, la docking station è parte sopra e parte sotto l'interfaccia. Questa disposizione fornisce un insieme molto prevedibile di distorsioni in cui il materiale attraversa l'interfaccia.
"Possiamo spostare questi robot in giro e raccogliere cose, " Steager dice, "costruire materiali davvero complicati raccogliendo i pezzi uno alla volta e agganciandoli dove vogliamo".
Poiché le interazioni tra i robot e le particelle non hanno nulla a che fare con i materiali di cui sono fatti, è possibile una vasta gamma di applicazioni.
"Le particelle che stiamo manipolando in questo studio hanno all'incirca le dimensioni medie di una cellula umana o più piccole, "Yao dice, "quindi questo tipo di sistema potrebbe avere applicazioni nel campo della biologia unicellulare, con un micro-robot magnetico che muove le singole cellule attraverso le diverse fasi di un esperimento."
"Queste particelle potrebbero anche far parte di un sistema di sensori, " dice. "Se avessi un robot e particelle sensoriali su un'interfaccia, potresti raccogliere quelle particelle e trasportare l'intero gruppo verso l'area di mira con un grado estremamente fine di controllo spaziale. In questo scenario, è necessaria una concentrazione molto bassa di particelle del sensore e possono essere facilmente ritratte dopo il test."
Il lavoro futuro comporterà lo sviluppo di una libreria più ampia di forme e comportamenti di micro-robot per manipolare oggetti nel loro ambiente, oltre a sistemi di rilevamento e controllo più robusti che consentirebbero un maggiore grado di autonomia per i robot.