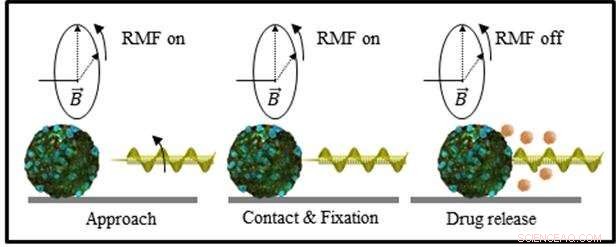
Il microrobot a forma di cavatappi viene caricato con un farmaco e quindi consegnato a un tessuto mirato utilizzando un campo magnetico esterno. L'estremità dell'ago agisce come una lancia, fissandolo al tessuto senza la necessità di applicazione continua di un campo magnetico. Credito:DGIST
Un ago microrobotico caricato con un farmaco si rivolge efficacemente e rimane attaccato al tessuto canceroso negli esperimenti di laboratorio senza bisogno di applicazione continua di un campo magnetico, consentendo una somministrazione più precisa del farmaco. I dettagli sono stati pubblicati dai ricercatori del Microrobot Research Center di DGIST in Corea e dai colleghi della rivista Materiali sanitari avanzati .
"I farmaci chemioterapici causano una vasta gamma di effetti collaterali a causa del loro impatto sui tessuti sani e cancerosi, " spiega l'ingegnere di robotica Hongsoo Choi del Daegu-Gyeongbuk Institute of Science &Technology (DGIST) della Corea. che ha condotto la ricerca. "Per evitare questi effetti indesiderati, gli scienziati hanno sperimentato microrobot di diverse forme che forniscono farmaci a tessuti specifici".
I microrobot armati di solito richiedono un campo magnetico per dirigerli verso i tessuti mirati e quindi tenerli in posizione, altrimenti sono facilmente eliminati dai fluidi corporei come il flusso sanguigno. Choi e colleghi volevano progettare un microrobot funzionale che evitasse l'uso poco pratico e prolungato di un campo magnetico che consuma energia.
Ci sono riusciti realizzando un microrobot a forma di cavatappi con un ago all'estremità.
Choi ha lavorato con Seungmin Lee e colleghi di DGIST per fabbricare il microago a forma di cavatappi usando la litografia laser. Il microrobot viene quindi stratificato con nichel e ossido di titanio per garantire che possa essere manipolato magneticamente e sia biocompatibile con il corpo umano. I farmaci possono essere caricati sul poroso, impalcatura a forma di cavatappi e all'interno dell'ago.
Il team ha testato i microrobot in minuscole camere piene di fluido. Hanno usato con successo un campo magnetico per dirigerli verso la lancia e attaccarli al tessuto. Una volta fissato, ci è voluta una velocità del flusso del fluido di 480 millimetri al secondo per lavare l'ago fuori dal tessuto. Per confronto, la portata nelle piccole arteriole è di circa 100 millimetri al secondo.
Hanno quindi utilizzato un approccio computazionale per operazioni automatiche più precise, piuttosto che manuale, mirare i tessuti utilizzando un campo magnetico. Il targeting e la fissazione automatici hanno richiesto solo sette secondi, mentre il controllo manuale del campo magnetico ha richiesto 55 secondi.
Finalmente, hanno caricato i microaghi con il farmaco antitumorale paclitaxel e li hanno testati in una microcamera contenente cellule tumorali del colon-retto umane. I microrobot hanno preso di mira e ucciso efficacemente le cellule.
Prossimo, il team prevede di migliorare il microrobot per un caricamento più efficiente dei farmaci e di ottimizzare il sistema del campo magnetico per un controllo più preciso. Saranno necessari ulteriori test sugli animali e poi sull'uomo prima che i microrobot possano essere utilizzati come strategia di trattamento.