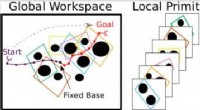
Uscita della rete neurale per controllare i motori del robot. Credito:Blanchard, Aihara &Levi.
Negli ultimi anni, un numero crescente di studi è stato finalizzato allo sviluppo di robot ispirati alla natura, in particolare da alcune specie di animali. In uno studio pubblicato sul Journal of Robotics di Atlantis Press, Rete e vita artificiale, un team di ricercatori dell'Università di Bordeaux e dell'Università di Tokyo ha creato un robot che ricorda un serpente sia nella forma che nei movimenti.
"L'obiettivo principale di questa ricerca era sviluppare un robot per applicazioni biomediche, soprattutto lesioni del midollo spinale, "Timothée Levi, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Vorremmo progettare nuove neuroprotesi in cui i neuroni artificiali possano sostituire quelli biologici. Nel nostro robot, abbiamo usato una locomozione biomimetica usando reti neurali spiking biomimetiche, che riproduce lo stesso comportamento che i serpenti hanno in natura."
Una delle sfide chiave nello sviluppo di robot di ispirazione biologica è riprodurre efficacemente la locomozione dell'animale di interesse. Negli animali, la maggior parte dei movimenti è generata dall'attività delle reti di generazione di pattern centrali (CPG).
Essenzialmente, I CPG sono circuiti neuronali che, quando attivato, può produrre schemi motori ritmici (ad esempio camminare, respirazione, nuoto, ecc.) in assenza di input sensoriali e temporali. Nel passato, I CPG e i loro effetti sulla locomozione animale sono stati al centro di un vasto numero di studi.
In genere, i ricercatori che stanno cercando di sviluppare robot simili ad animali replicano i CPG usando semplici modelli di neuroni o oscillatori, che non sono scale temporali biologiche, e sono quindi considerati sistemi bio-ispirati piuttosto che bio-mimetici. Questi modelli, però, fornire semplicemente oscillazioni sinusoidali, e quindi non sono in grado di riprodurre fedelmente una varietà di modelli di locomozione animale.
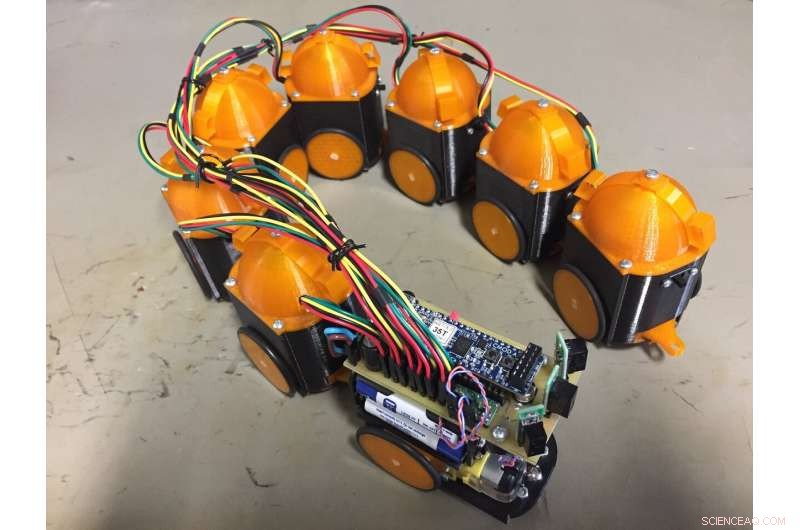
Il robot serpente sviluppato dai ricercatori. Credito:Blanchard, Aihara &Levi.
Nel loro studio, Levi e i suoi colleghi hanno deciso di sviluppare CPG biomimetici in grado di replicare efficacemente il comportamento biologico, utilizzando un sistema neuromorfo digitale in tempo reale. Il robot serpente che hanno sviluppato ha due componenti chiave, uno agisce come il suo cervello e l'altro come il suo corpo.
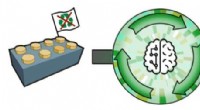
"Il nostro robot serpente può essere diviso in 2 parti, " Spiegò Levi. "Il primo è il suo cervello, utilizzando reti neurali biomimetiche. Questa rete neurale è molto vicina alla biologia con un modello neuronale biofisico, sinapsi e plasticità. La seconda parte è il corpo, che ha diversi "carri" che modellano le diverse parti del midollo spinale e segmenti di serpenti. Il segnale è creato dal cervello del serpente e si propaga in tutto il corpo controllando i diversi motori."
Il robot serpente creato da Levi e dai suoi colleghi è controllato in tempo reale da una rete di CPG biomimetici. I ricercatori hanno dimostrato che il loro sistema può essere collegato a neuroni biologici e potrebbe anche essere utilizzato per simulare diverse ipotesi o protocolli di trattamento per applicazioni biomediche, come lesioni del midollo spinale e neuroprotesi.
"Secondo me, l'aspetto più significativo del nostro studio è che abbiamo cercato di essere fedeli alla biologia e siamo riusciti a incorporare la rete neurale in una piccola perlina elettronica, "Levi ha detto. "Interessante, il robot che abbiamo creato funziona in tempo reale e ha le stesse specifiche che in natura (periodo di locomozione, variabilità, rumore, eccetera.)."
Nel futuro, il robot serpente sviluppato da Levi e dai suoi colleghi potrebbe avere una varietà di interessanti applicazioni nella robotica e in altri campi. Ad esempio, potrebbe essere utilizzato per comprendere meglio il comportamento dei rettili o potrebbe avere più applicazioni di robotica bio-ibrida.
"Ora stiamo pianificando di aggiungere più intelligenza nel cervello del robot con regole di apprendimento, oltre a utilizzare i diversi sensori, "Levi ha detto. "Inoltre, uno dei nostri obiettivi a lungo termine è combinare neuroni artificiali e neuroni viventi per creare un robot bioibrido".
© 2019 Scienza X Rete