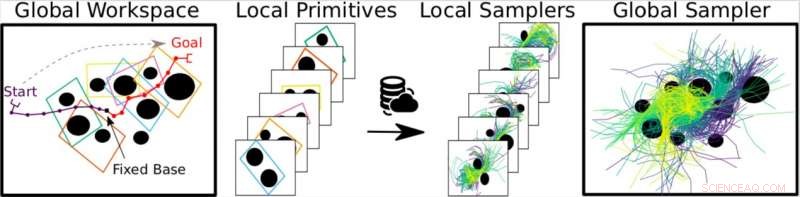
Un'illustrazione della struttura proposta in un manipolatore planare. Attestazione:Chamzas, Shrivastava e Kavraki.
Mentre gli esseri umani possono eseguire movimenti in modo naturale e istantaneo, i robot richiedono strategie avanzate di pianificazione del movimento per navigare nell'ambiente circostante. La pianificazione del movimento è quindi un'area chiave della ricerca robotica, finalizzato allo sviluppo di strumenti e tecniche che consentano ai robot di operare autonomamente in una varietà di ambienti.
Mentre gli studi precedenti hanno introdotto una varietà di tecniche di pianificazione del movimento, in particolare algoritmi basati sul campionamento, la maggior parte di essi non funziona in modo ottimale in tutti gli ambienti. Una limitazione chiave di molti di questi approcci è che approssimano la connettività di spazi ad alta dimensionalità con un piccolo numero di campioni, che ostacola la loro performance in scenari in cui le aree necessarie per la connettività dello spazio hanno una bassa probabilità di essere campionate. Questo è comunemente indicato come il "problema dei passaggi stretti".
Per affrontare i limiti dei metodi di pianificazione del movimento esistenti, ricercatori della Rice University, nel Texas, hanno sviluppato un nuovo approccio che scompone lo spazio di lavoro in primitive locali, memorizzare le loro esperienze locali sotto forma di campionatori locali e archiviarle in un database. Il loro metodo, delineato in un documento pre-pubblicato su arXiv, è principalmente una prova di concetto, in quanto finora è stato testato solo in un ambiente geometrico piuttosto semplificato. Ciò nonostante, il lavoro di questi ricercatori ha il potenziale per risolvere alcune sfide chiave incontrate nella ricerca sulla pianificazione del movimento.
"Il nostro studio si è concentrato esclusivamente sul problema della pianificazione del movimento geometrico, "Costantinos Chamzas, uno dei ricercatori che ha condotto lo studio, detto TechXplore . "In poche parole, hai un robot e alcuni ostacoli e vuoi trovare un percorso per spostare il tuo robot dal punto A al punto B senza scontrarsi con gli ostacoli."
Oltre a queste capacità generali di pianificazione del movimento, in scenari di vita reale (ad esempio durante l'esecuzione di lavori domestici) un robot dovrebbe anche risolvere query di pianificazione del movimento che si ripetono continuamente. La maggior parte degli approcci di pianificazione del movimento esistenti costringe i robot a completare le attività della vita reale risolvendo nuove query da zero, anche se una nuova query assomiglia a una che è stata completata con successo in passato.

Esempio di un robot che preleva cilindri da una libreria, che è un'attività con query di pianificazione del movimento ripetitive. Attestazione:Chamzas, Shrivastava e Kavraki.
I ricercatori stanno quindi cercando di sviluppare nuove tecniche che utilizzino le soluzioni ai precedenti piani di movimento per informare la ricerca di una soluzione a una nuova query di pianificazione del movimento simile. L'approccio ideato da Chamzas e dai suoi colleghi consente di raggiungere questo obiettivo utilizzando le conoscenze precedenti relative all'ambiente che prendono di mira in modo specifico i passaggi stretti precedentemente incontrati per adattare la propria strategia di campionamento al problema in questione.
"Durante l'allenamento, il metodo proposto scompone il problema dato in sottoproblemi più semplici, risolvendo ognuno individualmente, e quindi memorizza queste sotto-soluzioni in un database sotto forma di distribuzioni campionarie, " Chamzas ha spiegato. "Quando sorge un nuovo problema di pianificazione, il problema globale si scompone nuovamente in problemi locali, e il nostro metodo recupera le distribuzioni di campionamento pertinenti che corrispondono a quelle locali per creare una distribuzione di campionamento globale che guidi la ricerca in modo molto più informativo".
Essenzialmente, l'approccio alla pianificazione del movimento ideato da Chamzas e dai suoi colleghi suddivide un problema in sottoproblemi, combinando metodi di database tradizionali con campionamento informato. Questo lo distingue dagli approcci esistenti, che in genere utilizzano un database con soluzioni precalcolate che vengono riparate in fase di esecuzione o utilizzano modelli che tentano di dedurre una buona distribuzione di campionamento per un determinato ambiente.
"I due principali contributi del nostro studio sono che alcuni problemi, che prima erano praticamente impossibili da risolvere con i metodi tradizionali, può essere risolto scomponendo e che l'uso di questa combinazione di database/campionamento è più efficace in alcuni casi rispetto ad altri metodi, " disse Chamza.
Finora, i ricercatori hanno valutato il loro metodo in prove preliminari con semplici primitive geometriche. I risultati sono promettenti, poiché il loro metodo permetteva loro di risolvere problemi che i precedenti approcci non erano in grado di risolvere o risolvevano molto male.
Nel futuro, l'approccio proposto da Chamzas e dai suoi colleghi potrebbe aiutare a superare alcuni dei limiti degli approcci di pianificazione del movimento esistenti, consentendo ai robot di trasferire le conoscenze precedentemente acquisite in ambienti diversi e migliorando così le loro prestazioni. I ricercatori stanno ora progettando di applicare lo stesso approccio in ambienti geometrici più complicati. Vorrebbero anche esplorare i modi in cui il loro metodo potrebbe apprendere le distribuzioni campionarie, piuttosto che adattarli a soluzioni precedenti.
© 2019 Science X Network