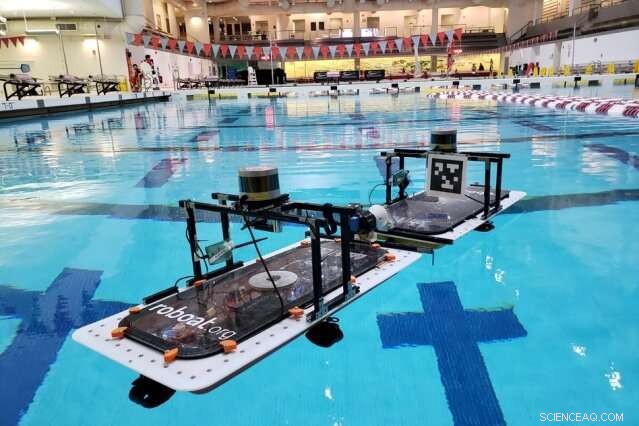
I ricercatori del MIT hanno dato alla loro flotta di "roboat" autonomi la capacità di mirare e aggrapparsi automaticamente l'uno all'altro e continuare a provare se falliscono. I roboat sono progettati per trasportare persone, raccogliere la spazzatura, e si autoassemblano in strutture galleggianti nei canali di Amsterdam. Credito:Massachusetts Institute of Technology
La città di Amsterdam immagina un futuro in cui flotte di barche autonome percorrono i suoi numerosi canali per trasportare merci e persone, raccogliere la spazzatura, o autoassemblarsi in palchi galleggianti e ponti. Per favorire quella visione, I ricercatori del MIT hanno dato nuove capacità alla loro flotta di barche robotiche, che sono in fase di sviluppo come parte di un progetto in corso, che consente loro di mirare e aggrapparsi l'uno all'altro, e continua a provare se falliscono.
Circa un quarto della superficie di Amsterdam è acqua, con 165 canali che si snodano lungo le strade trafficate della città. Diversi anni fa, Il MIT e l'Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute) hanno collaborato al progetto "Roboat". L'idea è quella di costruire una flotta di barche robotiche autonome:scafi rettangolari dotati di sensori, propulsori, microcontrollori, moduli GPS, macchine fotografiche, e altro hardware, che fornisce mobilità intelligente sull'acqua per alleviare la congestione nelle strade trafficate della città.
Uno degli obiettivi del progetto è quello di creare unità roboat che forniscano il trasporto su richiesta sui corsi d'acqua. Un altro obiettivo è utilizzare le unità roboat per formare automaticamente strutture "pop-up", come ponti pedonali, fasi di spettacolo, o anche mercati alimentari. Le strutture potrebbero quindi essere smontate automaticamente in orari prestabiliti e trasformate in strutture target per diverse attività. Inoltre, le unità roboat potrebbero essere utilizzate come sensori agili per raccogliere dati sull'infrastruttura della città, e la qualità dell'aria e dell'acqua, tra l'altro.
Nel 2016, I ricercatori del MIT hanno testato un prototipo di roboat che ha navigato lungo i canali di Amsterdam, andando avanti, indietro, e lateralmente lungo un percorso preprogrammato. L'anno scorso, ricercatori progettati a basso costo, stampato in 3D, versioni in scala un quarto delle barche, che erano più efficienti e agili, ed era dotato di algoritmi avanzati di tracciamento della traiettoria.
In un documento presentato alla Conferenza Internazionale sulla Robotica e l'Automazione, i ricercatori descrivono le unità roboat che ora possono identificare e connettersi alle stazioni di attracco. Gli algoritmi di controllo guidano i roboat verso l'obiettivo, dove si collegano automaticamente a un meccanismo di chiusura personalizzato con precisione millimetrica. Inoltre, il roboat si accorge se ha perso la coincidenza, fa il backup, e riprova.
I ricercatori hanno testato la tecnica di chiusura in una piscina del MIT e nel fiume Charles, dove le acque sono più agitate. In entrambi i casi, le unità roboat di solito erano in grado di connettersi con successo in circa 10 secondi, a partire da circa 1 metro di distanza, oppure ci sono riusciti dopo alcuni tentativi falliti. Ad Amsterdam, il sistema potrebbe essere particolarmente utile per la raccolta dei rifiuti durante la notte. Le unità di roboat potrebbero navigare intorno a un canale, individuare e agganciarsi a piattaforme che contengono contenitori della spazzatura, e riportarli ai centri di raccolta.
"Ad Amsterdam, i canali un tempo erano usati per il trasporto e altre cose per cui ora sono utilizzate le strade. Le strade vicino ai canali sono ora molto congestionate e presentano rumore e inquinamento, quindi la città vuole aggiungere più funzionalità ai canali, " dice il primo autore Luis Mateos, uno studente laureato presso il Dipartimento di Studi Urbani e Pianificazione (DUSP) e un ricercatore presso il MIT Senseable City Lab. "Le tecnologie di guida autonoma possono far risparmiare tempo, costi ed energia, e migliorare la città andando avanti".
"L'obiettivo è utilizzare le unità roboat per dare vita a nuove capacità sull'acqua, " aggiunge la coautrice Daniela Rus, direttore del Laboratorio di Informatica e Intelligenza Artificiale (CSAIL) e Andrea ed Erna Viterbi Professore di Ingegneria Elettrica e Informatica. "Il nuovo meccanismo di chiusura è molto importante per la creazione di strutture pop-up. Roboat non ha bisogno di chiusura per il trasporto autonomo sull'acqua, ma hai bisogno dell'aggancio per creare qualsiasi struttura, che sia mobile o fisso."
Insieme a Mateos sulla carta ci sono:Wei Wang, un postdoc congiunto in CSAIL e Senseable City Lab; Banti Gheneti, uno studente laureato presso il Dipartimento di Ingegneria Elettrica e Informatica; Fabio Duarte, un ricercatore DUSP e Senseable City Lab; e Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
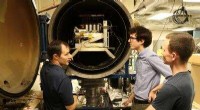
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, Indietro, and sides. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Tipicamente, this would generate a 3-D map for boat motion, including roll, pitch, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. Utilizzando tali informazioni, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Se, però, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, dire, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. All'inizio, all roboat units will be given a code to stay exactly a meter apart. Quindi, the code changes to direct the first roboat to latch. After, the screen switches codes to order the next roboat to latch, e così via. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " lui dice, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.