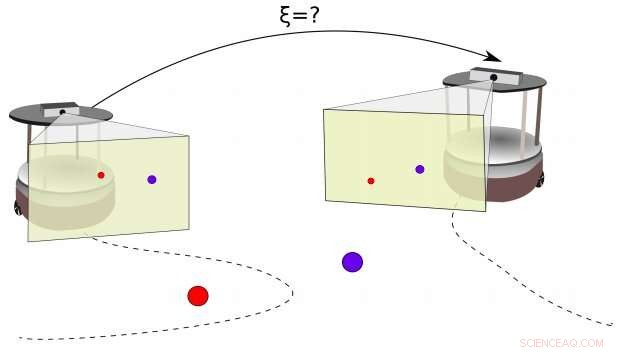
Una rappresentazione del problema affrontato nel recente studio. Due robot stanno osservando una coppia di punti 3D. I ricercatori propongono una pipeline per stimare contemporaneamente la profondità 3D dei due punti 3D e ottenere contemporaneamente la loro posa relativa. Credito:Rodrigues et al.
I ricercatori dell'Università di Porto in Portogallo e del KTH Royal Institute of Technology in Svezia hanno recentemente sviluppato un quadro in grado di stimare la profondità e la posizione relativa di due robot di terra che stanno collaborando a un determinato compito. Il loro quadro, delineato in un documento pre-pubblicato su arXiv, potrebbe aiutare a migliorare le prestazioni di più robot in attività che comportano l'esplorazione, manipolazione, copertura, campionamento e pattugliamento, così come nelle missioni di ricerca e salvataggio.
Negli ultimi anni, i ricercatori hanno condotto un numero crescente di studi volti a sviluppare soluzioni per coordinare efficacemente più robot all'interno di un'architettura decentralizzata. Per affrontare efficacemente un determinato compito in gruppo, i singoli robot all'interno di uno sciame o formazione dovrebbero essere almeno in parte consapevoli della posa di altri agenti nei loro dintorni.
Questi dati relativi alla posa, note come informazioni relative alla posa, consente a un agente di ottimizzare la funzione di un determinato obiettivo, riprogrammare le sue traiettorie ed evitare collisioni con altri robot. In alcune impostazioni del mondo reale, però, può essere difficile per gli agenti ottenere stime accurate della posa relativa. Ad esempio, durante missioni estreme in aree remote o appartate, i robot potrebbero incontrare problemi con i canali di comunicazione e con i sistemi di posizionamento o motion capture ad alta precisione.
Con questo in testa, il team di ricercatori dell'Università di Porto e del KTH si è proposto di sviluppare un quadro che potrebbe migliorare la stima della profondità 3D e la stima relativa della posa dei robot di terra che stanno lavorando insieme verso un obiettivo comune. Si sono concentrati in particolare su uno scenario che coinvolge due veicoli terrestri autonomi che navigano in un ambiente sconosciuto, entrambi dotati di telecamere prospettiche.
Pipeline del framework proposto dai ricercatori. Credito:Rodrigues et al.
"Il problema della stima della profondità mira a recuperare le informazioni 3D dell'ambiente, " spiegano i ricercatori nel loro articolo. "Il problema della localizzazione relativa consiste nella stima della posa relativa tra due robot, rilevando la posa dell'altro o condividendo informazioni sull'ambiente percepito."
La maggior parte delle soluzioni esistenti per la stima della profondità e la relativa localizzazione nei robot funzionano analizzando un insieme di dati disconnesso, senza tener conto dell'ordine cronologico degli eventi. L'approccio proposto dai ricercatori, d'altra parte, considera le informazioni raccolte individualmente dai due robot tramite le loro telecamere e poi le combina per calcolare la posa relativa tra di loro. Le informazioni sulla stima della profondità raccolte dai due agenti e dai comandi di input vengono inviate a un filtro di Kalman esteso (EKF), che è progettato per elaborare questi dati e stimare la relativa posa tra i robot.
"Mentre le soluzioni precedenti per questo problema considerano una serie di due o più immagini dall'ambiente o utilizzano una configurazione speciale della flotta (ad esempio i robot sono nel campo visivo dell'altro o hanno la capacità di rilevare le informazioni sui cuscinetti l'uno dell'altro posizioni), proponiamo un framework che condivida un insieme di osservazioni comuni dell'ambiente nel rispettivo frame locale di ciascun robot (vengono impiegate caratteristiche del punto 3-D), " scrivono i ricercatori.
I ricercatori hanno valutato la loro struttura in una serie di scenari simulati, utilizzando due robot di terra chiamati TurtleBots. Le loro scoperte suggeriscono che il loro approccio di fatto consente un'efficace stima della profondità e la relativa localizzazione per due robot che collaborano a un compito. Nel loro lavoro futuro, i ricercatori prevedono di considerare anche il controllo attivo di due robot nello stesso scenario esplorato nel loro recente studio, nonché altri aspetti rilevanti per il loro coordinamento.
© 2019 Scienza X Rete