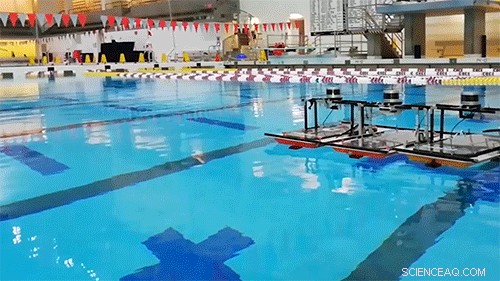
La flotta di barche robotiche del MIT è stata aggiornata con nuove capacità per "cambiare forma, ” disconnettendosi e rimontando autonomamente in diverse configurazioni per formare varie piattaforme galleggianti nei canali di Amsterdam. Negli esperimenti in piscina, le barche si sono riorganizzate da una linea retta collegata in una "L" (mostrata qui) e altre forme. Credito:Massachusetts Institute of Technology
La flotta di barche robotiche del MIT è stata aggiornata con nuove funzionalità per "cambiare forma, " scollegando e rimontando autonomamente in una varietà di configurazioni, per formare strutture galleggianti nei numerosi canali di Amsterdam.
Le barche autonome:scafi rettangolari dotati di sensori, propulsori, microcontrollori, moduli GPS, macchine fotografiche, e altro hardware, sono in fase di sviluppo nell'ambito del progetto "Roboat" in corso tra il MIT e l'Amsterdam Institute for Advanced Metropolitan Solutions (AMS Institute). Il progetto è guidato dai professori del MIT Carlo Ratti, Daniela Rus, Dennis francese, e Andrew Whittle. Nel futuro, Amsterdam vuole che le barche a motore percorrano i suoi 165 canali tortuosi, trasporto merci e persone, raccogliere immondizia, o autoassemblanti in piattaforme "pop-up", come ponti e palchi, per contribuire ad alleviare la congestione nelle strade trafficate della città.
Nel 2016, I ricercatori del MIT hanno testato un prototipo di roboat che potrebbe andare avanti, indietro, e lateralmente lungo un percorso preprogrammato nei canali. L'anno scorso, ricercatori progettati a basso costo, stampato in 3D, versioni in scala un quarto delle barche, che erano più efficienti e agili, ed era dotato di algoritmi avanzati di tracciamento della traiettoria. Nel mese di giugno, hanno creato un meccanismo di aggancio autonomo che consente alle barche di mirare e aggrapparsi l'una all'altra, e continua a provare se falliscono.
In un nuovo documento presentato all'IEEE International Symposium on Multi-Robot and Multi-Agent Systems della scorsa settimana, i ricercatori descrivono un algoritmo che consente ai robot di rimodellarsi senza problemi nel modo più efficiente possibile. L'algoritmo gestisce tutta la pianificazione e il monitoraggio che consente ai gruppi di unità roboat di sganciarsi l'uno dall'altro in una configurazione impostata, percorrere un percorso privo di collisioni, e ricollegarlo al punto appropriato sulla nuova configurazione del set.
Nelle dimostrazioni in un pool del MIT e nelle simulazioni al computer, gruppi di unità di navi roboanti collegate si sono riorganizzate da linee rette o quadrati in altre configurazioni, come rettangoli e forme a "L". Le trasformazioni sperimentali hanno richiesto solo pochi minuti. I cambiamenti di forma più complessi possono richiedere più tempo, a seconda del numero di unità mobili, che potrebbero essere dozzine, e delle differenze tra le due forme.
"Abbiamo permesso ai roboat di creare e interrompere i collegamenti con altri roboat, con la speranza di spostare le attività per le strade di Amsterdam verso l'acqua, "dice Rus, direttore del Laboratorio di Informatica e Intelligenza Artificiale (CSAIL) e Andrea ed Erna Viterbi Professore di Ingegneria Elettrica e Informatica. "Un insieme di barche può unirsi per formare forme lineari come ponti pop-up, se dobbiamo inviare materiali o persone da una sponda all'altra di un canale. O, possiamo creare piattaforme pop-up più ampie per i mercati dei fiori o alimentari".
Ad unirsi a Rus sulla carta sono:Ratti, direttore del Senseable City Lab del MIT, e, anche dal laboratorio, primo autore Banti Gheneti, Ryan Kelly, e Drew Meyers, tutti i ricercatori; postdottorato Shinkyu Park; e il ricercatore Pietro Leoni.
Credito:Massachusetts Institute of Technology
Traiettorie senza collisioni
Per il loro lavoro, i ricercatori hanno dovuto affrontare le sfide con una pianificazione autonoma, monitoraggio, e collegamento di gruppi di unità roboat. Dare a ciascuna unità capacità uniche di, ad esempio, localizzare l'un l'altro, concordare su come rompere e riformare, e poi muoviti liberamente, richiederebbero complesse tecniche di comunicazione e controllo che potrebbero rendere il movimento inefficiente e lento.
Per consentire operazioni più fluide, i ricercatori hanno sviluppato due tipi di unità:coordinatori e lavoratori. Uno o più lavoratori si collegano a un coordinatore per formare un'unica entità, denominata "piattaforma per navi connesse" (CVP). Tutte le unità coordinatore e lavoratore hanno quattro eliche, un microcontrollore abilitato senza fili, e diversi meccanismi di chiusura automatizzati e sistemi di rilevamento che consentono loro di collegarsi tra loro.
Coordinatori, però, inoltre sono dotati di GPS per la navigazione, e un'unità di misura inerziale (IMU), che calcola la localizzazione, posa, e velocità. I lavoratori hanno solo attuatori che aiutano il CVP a guidare lungo un percorso. Ogni coordinatore è a conoscenza e può comunicare in modalità wireless con tutti i lavoratori connessi. Le strutture comprendono più CVP, e i singoli CVP possono agganciarsi l'uno all'altro per formare un'entità più grande.
Durante il mutamento di forma, tutti i CVP collegati in una struttura confrontano le differenze geometriche tra la sua forma iniziale e la nuova forma. Quindi, ogni CVP determina se rimane nello stesso punto e se ha bisogno di muoversi. Ad ogni CVP in movimento viene quindi assegnato un tempo per lo smontaggio e una nuova posizione nella nuova forma.
Ogni CVP utilizza una tecnica di pianificazione della traiettoria personalizzata per calcolare un modo per raggiungere la sua posizione target senza interruzioni, ottimizzando il percorso per la velocità. Fare così, ogni CVP precalcola tutte le regioni libere da collisioni attorno al CVP in movimento mentre ruota e si allontana da uno stazionario.
Dopo aver precalcolato quelle regioni libere da collisioni, il CVP trova quindi la traiettoria più breve verso la sua destinazione finale, che ancora gli impedisce di colpire l'unità stazionaria. In particolare, vengono utilizzate tecniche di ottimizzazione per rendere molto efficiente l'intero processo di pianificazione della traiettoria, con il precalcolo che impiega poco più di 100 millisecondi per trovare e perfezionare percorsi sicuri. Utilizzando i dati del GPS e dell'IMU, il coordinatore quindi stima la sua posa e velocità al suo centro di massa, e controlla in modalità wireless tutte le eliche di ciascuna unità e si sposta nella posizione di destinazione.
Nei loro esperimenti, i ricercatori hanno testato CVP a tre unità, composto da un coordinatore e due operai, in diversi scenari mutaforma. Ogni scenario prevedeva che un CVP si sganciasse dalla forma iniziale e si spostasse e si riattaccasse a un punto target attorno a un secondo CVP.
Tre CVP, ad esempio, si riorganizzarono da una linea retta collegata, dove erano agganciati insieme ai loro lati, in una linea retta collegata davanti e dietro, così come una "L." Nelle simulazioni al computer, fino a 12 unità roboat si sono riorganizzate da, dire, un rettangolo in un quadrato o da un quadrato solido in una forma a Z.
Ingrandimento
Gli esperimenti sono stati condotti su unità di motoscafi di dimensioni quarti, che misurano circa 1 metro di lunghezza e mezzo metro di larghezza. Ma i ricercatori ritengono che il loro algoritmo di pianificazione della traiettoria si adatterà bene nel controllo di unità a grandezza naturale, che misurerà circa 4 metri di lunghezza e 2 metri di larghezza.
Tra circa un anno, i ricercatori hanno in programma di utilizzare i robot per formare un "ponte" dinamico attraverso un canale di 60 metri tra il Museo della scienza NEMO nel centro di Amsterdam e un'area in fase di sviluppo. Il progetto, chiamato RoundAround, impiegherà delle barche a motore per navigare in cerchio continuo attraverso il canale, far salire e scendere i passeggeri ai moli e fermarsi o deviare il percorso quando rilevano qualcosa sul percorso. Attualmente, camminare intorno a quel corso d'acqua dura circa 10 minuti, ma il ponte può ridurre quel tempo a circa due minuti.
"Questo sarà il primo ponte al mondo composto da una flotta di barche autonome, " dice Ratti. "Un ponte normale sarebbe super costoso, perché hai barche che passano, quindi avresti bisogno di un ponte meccanico che si apre o un ponte molto alto. Ma possiamo collegare due lati del canale [usando] barche autonome che diventano dinamiche, architettura reattiva che galleggia sull'acqua."
Per raggiungere tale obiettivo, i ricercatori stanno ulteriormente sviluppando i robot per garantire che possano contenere in sicurezza le persone, e sono robusti a tutte le condizioni atmosferiche, come la pioggia battente. Si stanno anche assicurando che i roboat possano collegarsi efficacemente ai lati dei canali, che possono variare notevolmente nella struttura e nel design.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.