Credito:Jiang, Zhou &Gravish.
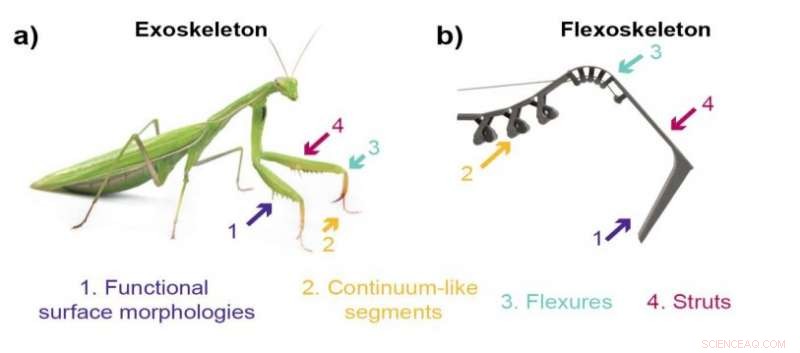
Gli insetti hanno tipicamente una varietà di complesse strutture esoscheletriche, che li supportano nei loro movimenti e nelle attività quotidiane. La fabbricazione di esoscheletri artificiali per robot ispirati agli insetti che corrispondano alla complessità di queste strutture naturali è una sfida chiave nel campo della robotica.
Sebbene i ricercatori abbiano proposto diversi processi e tecniche di fabbricazione per produrre esoscheletri per robot ispirati agli insetti, molti di questi metodi sono estremamente complessi o si basano su attrezzature e materiali costosi. Ciò li rende irrealizzabili e difficili da applicare su scala più ampia.
Con questo in testa, i ricercatori dell'Università della California a San Diego hanno recentemente sviluppato un nuovo processo per progettare e fabbricare componenti per robot ispirati agli insetti con strutture esoscheletriche. Hanno introdotto questo processo, chiamata stampa flessografica, in un articolo prepubblicato su arXiv.
"Ispirato dall'esoscheletro dell'insetto, presentiamo un nuovo processo di fabbricazione chiamato stampa "flexoskeleton" che consente la fabbricazione rapida e accessibile di robot ibridi rigidi/morbidi, " hanno scritto i ricercatori nel loro articolo.
Finora, i robot ibridi con componenti sia rigidi che morbidi sono stati generalmente costruiti utilizzando materiali costosi e stampanti 3D, così come processi di colata e macchina a più fasi. Nel loro studio, il team di ricerca dell'UC San Diego ha deciso di creare un nuovo metodo di fabbricazione che fosse più economico e più facile da usare.
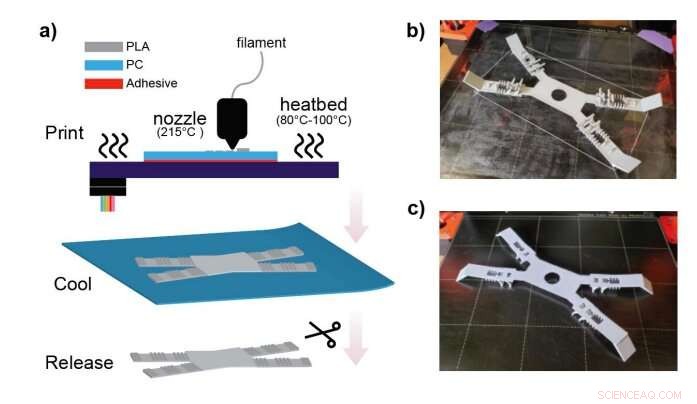
a) Una figura che spiega come funziona il processo di stampa introdotto dai ricercatori. b) Un robot a quattro zampe realizzato con il metodo dei ricercatori, subito dopo la stampa su un livello PC trasparente. c) Il robot a quattro zampe dopo il rilascio dal livello PC. Credito:Jiang, Zhou &Gravish.
Stampa flessografica, il metodo che hanno sviluppato, si basa su un adattamento di una stampante 3D di materiale a deposizione fusa (FDM) di livello consumer, che fornisce una forza di adesione estremamente forte tra il materiale depositato e lo strato di base flessibile della stampante. Questo processo può essere utilizzato per creare esoscheletri per robot ispirati agli insetti con diverse forme e morfologie.
Sorprendentemente, l'approccio di fabbricazione proposto dai ricercatori può essere utilizzato sia da utenti principianti che esperti, in quanto è abbastanza semplice e facile da capire. È anche molto più conveniente rispetto ai metodi di fabbricazione alternativi, poiché i materiali e le attrezzature su cui si basa sono notevolmente economici e facilmente disponibili.
Nel loro studio, il team ha dimostrato la fattibilità del loro approccio utilizzandolo per progettare e testare un'ampia varietà di elementi flexoscheletrici canonici. Hanno quindi combinato tutti gli elementi che hanno prodotto in un robot a quattro zampe che cammina con una struttura esoscheletrica flessibile.
"L'approccio che abbiamo sviluppato si basa molto sulle interrelazioni tra la geometria tridimensionale delle caratteristiche della superficie e il loro contributo alle proprietà meccaniche locali di quel componente, "I ricercatori hanno scritto nel loro articolo. "Prevediamo che questo metodo consentirà una nuova classe di robot di ispirazione biologica con particolare attenzione alle interrelazioni tra progettazione meccanica e locomozione".
Nel futuro, il nuovo processo di progettazione e fabbricazione ideato da questo team di ricercatori potrebbe consentire lo sviluppo di numerosi robot ispirati agli insetti. Poiché la tecnica è molto più semplice e conveniente rispetto alla maggior parte dei metodi esistenti, potrebbe anche rendere i robot esistenti o nuovi più facili da scalare, aumentando le loro possibilità di essere prodotti in quantità maggiori e di apparire sul mercato.
© 2019 Scienza X Rete