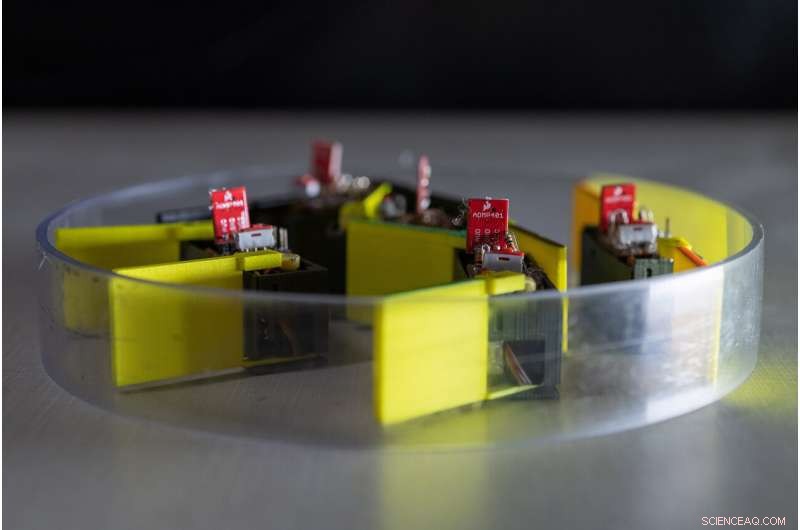
Cinque "smarticles" identici - particelle attive intelligenti - interagiscono tra loro in un recinto. Spingendosi a vicenda, il gruppo - soprannominato "supersmarticle" - può muoversi in modi casuali. Credito:Georgia Tech, Rob Felt
La costruzione di robot convenzionali in genere richiede un'attenta combinazione di componenti come motori, batterie, attuatori, segmenti corporei, gambe e ruote. Ora, i ricercatori hanno adottato un nuovo approccio, costruire un robot interamente da robot più piccoli noti come "smarticles" per sbloccare i principi di una tecnica di locomozione potenzialmente nuova.
Gli smarticles stampati in 3D, abbreviazione di particelle attive intelligenti, possono fare solo una cosa:sbattere le braccia. Ma quando cinque di questi smarticles sono confinati in un cerchio, cominciano a darsi una gomitata l'un l'altro, formando un sistema robofisico noto come "supersmarticle" che può muoversi da solo. L'aggiunta di un sensore di luce o suono consente al supersmarticle di muoversi in risposta allo stimolo e persino di essere controllato abbastanza bene da navigare in un labirinto.
Sebbene rudimentale ora, l'idea di creare robot da robot più piccoli e sfruttare le capacità di gruppo che derivano dalla combinazione di individui potrebbe fornire un controllo meccanico su robot molto piccoli. In definitiva, il comportamento emergente del gruppo potrebbe fornire un nuovo approccio di locomozione e controllo per piccoli robot che potrebbero potenzialmente cambiare forma.
"Si tratta di robot molto rudimentali il cui comportamento è dominato dalla meccanica e dalle leggi della fisica, " ha detto Dan Goldman, un professore della famiglia Dunn alla School of Physics del Georgia Institute of Technology. "Non stiamo cercando di mettere un controllo sofisticato, rilevamento e calcolo su tutti loro. Man mano che i robot diventano sempre più piccoli, dovremo usare i principi della meccanica e della fisica per controllarli perché non avranno il livello di calcolo e rilevamento di cui avremmo bisogno per il controllo convenzionale".
La ricerca, che è stato sostenuto dall'Ufficio di ricerca dell'esercito e dalla National Science Foundation, è prevista per la pubblicazione il 18 settembre sulla rivista Robotica scientifica . Anche i ricercatori della Northwestern University hanno contribuito al progetto.
La base per la ricerca è arrivata da una fonte improbabile:uno studio sui punti di forza della costruzione. Versando queste graffette resistenti in un contenitore con i lati rimovibili, ex dottorato di ricerca lo studente Nick Gravish, ora membro di facoltà presso l'Università della California a San Diego, ha creato strutture che sarebbero rimaste in piedi da sole dopo la rimozione delle pareti del container.
Scuotendo le torri di base alla fine le fece crollare, ma le osservazioni hanno portato a realizzare che il semplice intreccio di oggetti meccanici potrebbe creare strutture con capacità ben oltre quelle dei singoli componenti.
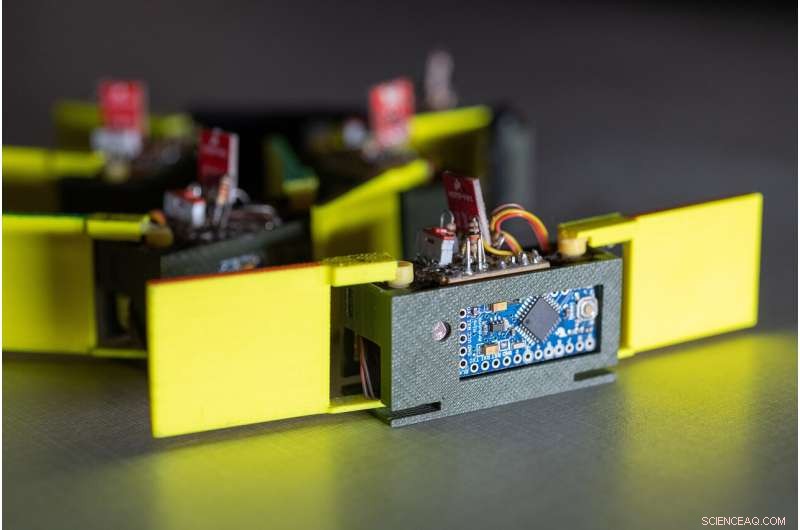
Primo piano di uno "smarticle" - particella attiva intelligente - che mostra i due bracci stampati in 3D, sensore di luce e motore. Credito:Georgia Tech, Rob Felt
"Un robot fatto di altri robot rudimentali è diventato la visione, "Ha detto Goldman. "Si potrebbe immaginare di realizzare un robot in cui si modificano un po' i suoi parametri geometrici e ciò che emerge sono comportamenti qualitativamente nuovi".
Per approfondire il concetto, l'assistente di ricerca laureato Will Savoie ha utilizzato una stampante 3D per creare smarticles a batteria, che hanno motori, sensori semplici e potenza di calcolo limitata. I dispositivi possono cambiare posizione solo quando interagiscono tra loro mentre sono racchiusi da un anello.
"Anche se nessun singolo robot potrebbe muoversi da solo, la nuvola composta da più robot poteva muoversi mentre si allontanava e rimpicciolirsi mentre si ricomponeva, " spiegò Goldman. "Se metti un anello intorno alla nuvola di piccoli robot, iniziano a darsi calci a vicenda e l'anello più grande, quello che chiamiamo supersmarticle, si muove in modo casuale".
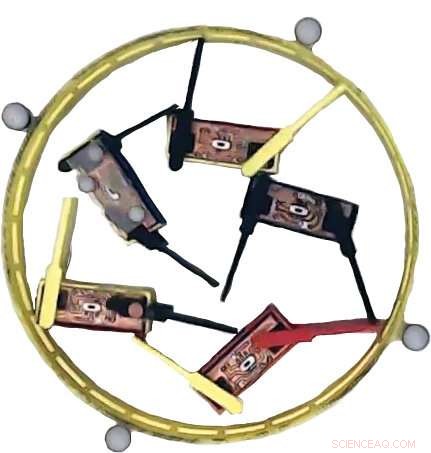
Un supersmart. Credito:Savoia et al., Sci. Robot. 4, eaax4316 (2019)
I ricercatori hanno notato che se un piccolo robot smetteva di muoversi, forse perché la sua batteria è morta, il gruppo di smarticles comincerebbe a muoversi nella direzione di quel robot in stallo. Il dottorando Ross Warkentin ha imparato a controllare il movimento aggiungendo fotosensori ai robot che fermano il braccio che sbatte quando un forte raggio di luce colpisce uno di loro.
"Se inclini la torcia nel modo giusto, puoi evidenziare il robot che vuoi rendere inattivo, e che fa oscillare l'anello verso di esso o lontano da esso, anche se nessun robot è programmato per muoversi verso la luce, " ha detto Goldman. "Ciò ha permesso di guidare l'ensemble in modo molto rudimentale, modo stocastico."
Il professore della School of Physics Kurt Wiesenfeld e lo studente laureato Zack Jackson hanno modellato il movimento di questi smarticles e supersmarticles per capire come le spinte e la massa dell'anello hanno influenzato il movimento generale. I ricercatori della Northwestern University hanno studiato come le interazioni tra gli smarticles fornissero il controllo direzionale.
"Per molti robot, we have electrical current move motors that generate forces on parts that collectively move a robot reliably, " said Todd Murphey, a professor of mechanical engineering who worked with Northwestern graduate students Thomas Berrueta and Ana Pervan. "We learned that although individual smarticles interact with each other through a chaos of wiggling impacts that are each unpredictable, the whole robot composed of those smarticles moves predictably and in a way that we can exploit in software."
Nel lavoro futuro, Goldman envisions more complex interactions that utilize the simple sensing and movement capabilities of the smarticles. "People have been interested in making a certain kind of swarm robots that are composed of other robots, " he said. "These structures could be reconfigured on demand to meet specific needs by tweaking their geometry."
The project is of interest to the U.S. Army because it could lead to new robotic systems capable of changing their shapes, modalities and functions, said Sam Stanton, program manager, complex dynamics and systems at the Army Research Office, an element of U.S. Army Combat Capabilities Development Command's Army Research Laboratory.
"Future Army unmanned systems and networks of systems are imagined to be capable of transforming their shape, modality and function. Per esempio, a robotic swarm may someday be capable of moving to a river and then autonomously forming a structure to span the gap, " he said. "Dan Goldman's research is identifying physical principles that may prove essential for engineering emergent behavior in future robot collectives as well as new understanding of fundamental trade-offs in system performance, responsiveness, uncertainty, resiliency and adaptivity."