 Hey, i robot possono giocare a prendere. Robot Justin, un sistema umanoide a due braccia, sviluppato dall'agenzia aerospaziale tedesca, Deutsches Zentrum fur Luft- und Raumfahrt, può svolgere autonomamente determinati compiti come prendere le palline o servire il caffè. Guarda altre immagini di robot. © Michael Dalder/Reuters/Corbis
Hey, i robot possono giocare a prendere. Robot Justin, un sistema umanoide a due braccia, sviluppato dall'agenzia aerospaziale tedesca, Deutsches Zentrum fur Luft- und Raumfahrt, può svolgere autonomamente determinati compiti come prendere le palline o servire il caffè. Guarda altre immagini di robot. © Michael Dalder/Reuters/Corbis Essere un umano è molto più facile che costruire un umano.
Prendi qualcosa di semplice come giocare a palla con un amico in giardino. Quando si scompone questa attività nelle funzioni biologiche discrete richieste per realizzarla, non è affatto semplice. Hai bisogno di sensori, trasmettitori ed effettori. Devi calcolare quanto è difficile lanciare in base alla distanza tra te e il tuo compagno. Devi tenere conto del riverbero del sole, velocità del vento e distrazioni vicine. È necessario determinare quanto saldamente afferrare la palla e quando stringere il guanto durante una presa. E devi essere in grado di elaborare una serie di scenari ipotetici:cosa succede se la palla mi passa sopra la testa? E se rotola in strada? E se si schianta contro la finestra del mio vicino?
Queste domande dimostrano alcune delle sfide più urgenti della robotica, e hanno preparato il terreno per il nostro conto alla rovescia. Abbiamo compilato un elenco delle 10 cose più difficili da insegnare ai robot ordinate approssimativamente dal "più facile" al "più difficile" - 10 cose che dovremo conquistare se vogliamo realizzare le promesse fatte da Bradbury, Cazzo, Asimov, Clarke e tutti gli altri narratori che hanno immaginato un mondo in cui le macchine si comportano come persone.
Contenuti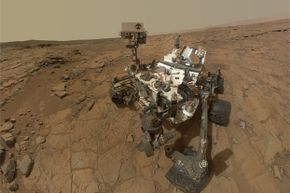 L'ultimo test di navigazione per un robot:Marte! Finora, La curiosità si è dimostrata piuttosto abile. Immagine per gentile concessione della NASA/JPL-Caltech/MSSS
L'ultimo test di navigazione per un robot:Marte! Finora, La curiosità si è dimostrata piuttosto abile. Immagine per gentile concessione della NASA/JPL-Caltech/MSSS Passare dal punto A al punto B sembra così facile. Noi umani lo facciamo tutto il giorno, ogni giorno. Per un robot, anche se, la navigazione, specialmente attraverso un singolo ambiente che cambia costantemente o tra ambienti mai incontrati prima, può essere un affare complicato. Primo, il robot deve essere in grado di percepire il suo ambiente, e quindi deve essere in grado di dare un senso ai dati in arrivo.
I robotisti affrontano il primo problema armando le loro macchine con una serie di sensori, scanner, telecamere e altri strumenti ad alta tecnologia per valutare l'ambiente circostante. Gli scanner laser sono diventati sempre più popolari, anche se non possono essere utilizzati in ambienti acquatici perché l'acqua tende a disturbare la luce e riduce drasticamente la portata del sensore. La tecnologia sonar offre una valida opzione nei robot subacquei, ma nelle applicazioni terrestri, è molto meno preciso. E, Certo, un sistema di visione costituito da un set di telecamere stereoscopiche integrate può aiutare un robot a "vedere" il suo paesaggio.
La raccolta di dati sull'ambiente è solo metà della battaglia. La sfida più grande riguarda l'elaborazione di quei dati e il loro utilizzo per prendere decisioni. Molti ricercatori fanno navigare i loro robot utilizzando una mappa prestabilita o costruendo una mappa al volo. Nella robotica, questo è noto come SBATTERE -- localizzazione e mappatura simultanee . La mappatura descrive come un robot converte le informazioni raccolte con i suoi sensori in una data rappresentazione. La localizzazione descrive come un robot si posiziona rispetto alla mappa. In pratica, questi due processi devono avvenire contemporaneamente, creando un enigma del pollo e dell'uovo che i ricercatori sono stati in grado di superare con computer più potenti e algoritmi avanzati che calcolano la posizione in base alle probabilità.
 ventuno, un robot finalizzato ad aiutare le persone anziane e disabili in casa, dimostra la sua capacità di trattenere oggetti delicati manipolando una cannuccia tra le dita alla Waseda University di Tokyo l'8 gennaio, 2009. © Issei Kato/Reuters/Corbis
ventuno, un robot finalizzato ad aiutare le persone anziane e disabili in casa, dimostra la sua capacità di trattenere oggetti delicati manipolando una cannuccia tra le dita alla Waseda University di Tokyo l'8 gennaio, 2009. © Issei Kato/Reuters/Corbis I robot raccolgono da anni pacchi e parti nelle fabbriche e nei magazzini. Ma generalmente evitano gli umani in queste situazioni, e lavorano quasi sempre con oggetti di forma coerente in ambienti privi di ingombri. La vita è molto meno strutturata per qualsiasi robot che si avventuri oltre la fabbrica. Se una macchina del genere spera mai di funzionare nelle case o negli ospedali, avrà bisogno di un avanzato senso del tatto in grado di rilevare le persone vicine e selezionare un elemento da una raccolta disordinata di cose.
Queste sono abilità difficili da imparare per un robot. Tradizionalmente, gli scienziati hanno evitato del tutto di toccarsi, programmando che le loro macchine si guastino se entrano in contatto con un altro oggetto. Ma negli ultimi cinque anni o giù di lì, ci sono stati progressi significativi nei design conformi e nella pelle artificiale. Conformità si riferisce al livello di flessibilità di un robot. Le macchine altamente flessibili sono più conformi; le macchine rigide lo sono meno.
Nel 2013, I ricercatori della Georgia Tech hanno costruito un braccio robotico con molle per giunti, che consente all'appendice di piegarsi e interagire con il suo ambiente più come un braccio umano. Prossimo, coprivano il tutto con una "pelle" capace di percepire la pressione o il tatto. Alcune skin per robot contengono circuiti stampati esagonali ad incastro, ciascuno dotato di sensori a infrarossi in grado di rilevare tutto ciò che si avvicina a meno di un centimetro. Altri sono dotati di "impronte digitali" elettroniche:superfici rialzate e increspate che migliorano la presa e facilitano l'elaborazione del segnale.
Combina questi bracci ad alta tecnologia con sistemi di visione migliorati, e ottieni un robot che può offrire una tenera carezza o raggiungere gli armadietti per selezionare un oggetto da una collezione più ampia.
 L'ingegnere meccatronico Ben Schaefer interagisce con il barista robot umanoide Carl mentre prepara un drink al Robots Bar and Lounge in Germania il 26 luglio, 2013. Sviluppato da Schaefer, Carl può anche interagire con i clienti in piccole conversazioni. © Fabrizio Bensch/Reuters/Corbis
L'ingegnere meccatronico Ben Schaefer interagisce con il barista robot umanoide Carl mentre prepara un drink al Robots Bar and Lounge in Germania il 26 luglio, 2013. Sviluppato da Schaefer, Carl può anche interagire con i clienti in piccole conversazioni. © Fabrizio Bensch/Reuters/Corbis Alan M. Turing, uno dei fondatori dell'informatica, nel 1950 fece un'audace previsione:le macchine un giorno sarebbero state in grado di parlare così fluentemente che non saremmo stati in grado di distinguerle dagli umani. ahimè, i robot (anche Siri) non sono ancora all'altezza delle aspettative di Turing. Questo perché il riconoscimento vocale è molto diverso da elaborazione del linguaggio naturale -- cosa fa il nostro cervello per estrarre significato da parole e frasi durante una conversazione.
Inizialmente, gli scienziati pensavano che sarebbe stato semplice come collegare le regole della grammatica ai banchi di memoria di una macchina. Ma l'hardcoding di un primer grammaticale per una data lingua si è rivelato impossibile. Anche fornire regole sui significati delle singole parole ha reso l'apprendimento delle lingue un compito arduo. Hai bisogno di un esempio? Pensa a "nuovo" e "sapevo" o "banca" (un posto dove mettere i soldi) e "banca" (il lato di un fiume). Si scopre che gli umani danno un senso a queste idiosincrasie linguistiche facendo affidamento su capacità mentali sviluppate in molti, molti anni di evoluzione, e gli scienziati non sono stati in grado di suddividere queste capacità in discreti, regole identificabili.
Di conseguenza, molti robot oggi basano la loro elaborazione del linguaggio sulle statistiche. Gli scienziati danno loro da mangiare enormi raccolte di testi, noto come a corpus , e poi lascia che i loro computer scompongano il testo più lungo in blocchi per scoprire quali parole spesso si uniscono e in quale ordine. Ciò consente al robot di "imparare" un linguaggio basato su analisi statistiche. Per esempio, a un robot, la parola "pipistrello" accompagnata dalla parola "mosca" o "ala" si riferisce al mammifero volante, mentre "pipistrello" seguito da "palla" o "guanto" si riferisce allo sport di squadra.
 Un robot mostra le sue abilità di scrittura durante un concorso di robot intelligenti creati da studenti universitari presso l'Università cinese di scienza e tecnologia di Anhui il 16 novembre. 2012. © Chen Bin/Xinhua Press/Corbis
Un robot mostra le sue abilità di scrittura durante un concorso di robot intelligenti creati da studenti universitari presso l'Università cinese di scienza e tecnologia di Anhui il 16 novembre. 2012. © Chen Bin/Xinhua Press/Corbis Diciamo che qualcuno che non ha mai giocato a golf vuole imparare a far oscillare una mazza. Potrebbe leggere un libro su di esso e poi provarlo, o potrebbe guardare un giocatore di golf esperto fare i movimenti corretti, un approccio più rapido e semplice all'apprendimento del nuovo comportamento.
I robotisti affrontano un dilemma simile quando cercano di costruire una macchina autonoma in grado di apprendere nuove abilità. Un approccio, come con l'esempio del golf, consiste nello scomporre un'attività in passaggi precisi e quindi programmare le informazioni nel cervello del robot. Ciò presuppone che ogni aspetto dell'attività possa essere sezionato, descritto e codificato, quale, come risulta, non è sempre facile da fare. Ci sono alcuni aspetti dello swing di una mazza da golf, Per esempio, che probabilmente non può essere descritto, come l'interazione di polso e gomito. Questi dettagli sottili possono essere comunicati molto più facilmente mostrandoli piuttosto che raccontandoli.
Negli ultimi anni, i ricercatori hanno avuto un certo successo nell'insegnare ai robot a imitare un operatore umano. Lo chiamano questo apprendimento per imitazione o imparare dalla dimostrazione ( LfD ), e ci riescono armando le loro macchine con serie di telecamere grandangolari e zoom. Questa attrezzatura consente al robot di "vedere" un insegnante umano che esegue un processo o un'attività specifica. Gli algoritmi di apprendimento elaborano quindi questi dati per produrre una mappa delle funzioni matematiche che collega l'input visivo alle azioni desiderate. Certo, i robot negli scenari LfD devono essere in grado di ignorare alcuni aspetti del comportamento del suo insegnante - come grattarsi un prurito - e affrontare problemi di corrispondenza, che si riferisce ai modi in cui l'anatomia di un robot differisce da quella di un umano.
Gli scoiattoli sono praticati nell'arte dell'inganno, così i ricercatori si sono rivolti a questi astuti roditori per alcune idee sull'insegnamento del comportamento ingannevole dei robot. John Foxx/Stockbyte/Thinkstock L'arte dell'inganno si è evoluta per aiutare gli animali ad avere un vantaggio sui loro concorrenti ed evitare di essere mangiati dai predatori. Con la pratica, l'abilità può diventare un meccanismo di sopravvivenza altamente efficace.
Per i robot, imparare a ingannare una persona o un altro robot è stato impegnativo (e potrebbe andar bene per te). L'inganno richiede l'immaginazione - la capacità di formare idee o immagini di oggetti esterni non presenti ai sensi - che è qualcosa che in genere manca alle macchine (vedi l'elemento successivo nella nostra lista). Sono ottimi per elaborare l'input diretto dai sensori, fotocamere e scanner, ma non così bravo a formare concetti che esistono al di là di tutti quei dati sensoriali.
Tuttavia, i robot del futuro potrebbero essere più esperti nell'inganno. I ricercatori della Georgia Tech sono stati in grado di trasferire alcune abilità ingannevoli degli scoiattoli ai robot nel loro laboratorio. Primo, hanno studiato i roditori pelosi, che proteggono le loro riserve di cibo sepolto portando i concorrenti a vecchi, cache inutilizzate. Quindi hanno codificato quei comportamenti in semplici regole e li hanno caricati nel cervello dei loro robot. Le macchine sono state in grado di utilizzare gli algoritmi per determinare se l'inganno potesse essere utile in una determinata situazione. Se è così, sono stati quindi in grado di fornire una falsa comunicazione che ha portato un robot compagno lontano dal loro nascondiglio.
 Se gli umani trascorreranno molto tempo con i robot, come questo umanoide soprannominato ROBOY, le macchine dovranno migliorare un po' nel prevedere cosa faranno dopo gli umani apparentemente imprevedibili. © Erik Tham/Corbis
Se gli umani trascorreranno molto tempo con i robot, come questo umanoide soprannominato ROBOY, le macchine dovranno migliorare un po' nel prevedere cosa faranno dopo gli umani apparentemente imprevedibili. © Erik Tham/Corbis Su "I Jetsons, " Rosie la cameriera robot è stata in grado di tenere conversazioni, cuocere i cibi, pulire la casa e soddisfare i bisogni e i desideri di George, Jane, Judy ed Elroy. Per comprendere lo sviluppo avanzato di Rosie, considera questa scena del primo episodio della prima stagione:Mr. Spacely, il capo di Giorgio, viene a cena a casa dei Jetson. Dopo pranzo, Il signor Spacely tira fuori un sigaro e se lo mette in bocca, che spinge Rosie a correre con un accendino. Questa semplice azione rappresenta un comportamento umano complesso:la capacità di anticipare ciò che verrà dopo in base a ciò che è appena accaduto.
come l'inganno, anticipare l'azione umana richiede che un robot immagini uno stato futuro. deve poter dire, "Se osservo un umano che fa x, allora posso aspettarmi, sulla base di precedenti esperienze, che probabilmente seguirà y." Questa è stata una seria sfida nella robotica, ma gli umani stanno facendo progressi. Alla Cornell University, un team ha lavorato per sviluppare un robot autonomo in grado di reagire in base a come un compagno interagisce con gli oggetti nell'ambiente. Per realizzare questo, il robot utilizza una coppia di telecamere 3D per ottenere un'immagine dell'ambiente circostante. Prossimo, un algoritmo identifica gli oggetti chiave nella stanza e li isola dal disordine di fondo. Quindi, utilizzando una vasta gamma di informazioni raccolte da precedenti sessioni di formazione, il robot genera una serie di probabili anticipazioni basate sul movimento della persona e sugli oggetti che tocca. Il robot indovina cosa accadrà dopo e agisce di conseguenza.
I robot Cornell continuano a sbagliare qualche volta, ma stanno facendo progressi costanti, soprattutto con il miglioramento della tecnologia della fotocamera.
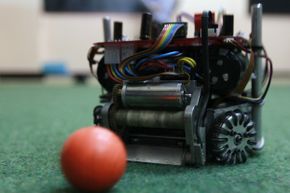 Primo piano di un membro della squadra di calcio robotica della Columbia. Uno dei campionati RoboCup Soccer presenta più robot completamente autonomi che lavorano insieme per praticare questo sport. Un'altra lega presenta robot umanoidi! © John Vizcaino/Reuters/Corbis
Primo piano di un membro della squadra di calcio robotica della Columbia. Uno dei campionati RoboCup Soccer presenta più robot completamente autonomi che lavorano insieme per praticare questo sport. Un'altra lega presenta robot umanoidi! © John Vizcaino/Reuters/Corbis Costruire un unico, macchina su larga scala - un androide, se vuoi -- richiede notevoli investimenti di tempo, energia e denaro. Un altro approccio prevede il dispiegamento di un esercito di piccoli, robot più semplici che poi lavorano insieme per svolgere compiti più complessi.
Questo porta una serie diversa di sfide. Un robot che lavora all'interno di una squadra deve essere in grado di posizionarsi con precisione in relazione ai compagni di squadra e deve essere in grado di comunicare in modo efficace, con altre macchine e con operatori umani. Per risolvere questi problemi, gli scienziati si sono rivolti al mondo degli insetti, che mostrano un comportamento di sciamatura complesso per trovare cibo e completare compiti che avvantaggiano l'intera colonia. Per esempio, studiando le formiche, i ricercatori sanno che gli individui usano i feromoni per comunicare tra loro.
I robot possono utilizzare questa stessa "logica dei feromoni, "Anche se si basano sulla luce, non prodotti chimici, comunicare. Funziona così:un gruppo di minuscoli bot è disperso in un'area ristretta. All'inizio, esplorano l'area in modo casuale finché un individuo non incontra una traccia di luce lasciata da un altro bot. Sa seguire il sentiero e lo fa, lasciando la propria traccia di luce mentre va. Man mano che il sentiero si rinforza, sempre più bot lo trovano e si uniscono alla carovana. Alcuni ricercatori hanno anche riscontrato successo utilizzando cinguettii udibili. Il suono può essere utilizzato per assicurarsi che i singoli robot non si allontanino troppo o per attirare i compagni di squadra verso un oggetto di interesse.
 Un'idra mostra la sua capacità di autoreplicarsi, uno che ad alcuni robotisti non dispiacerebbe incorporare nelle loro macchine. luismmolina/iStock/Thinkstock
Un'idra mostra la sua capacità di autoreplicarsi, uno che ad alcuni robotisti non dispiacerebbe incorporare nelle loro macchine. luismmolina/iStock/Thinkstock Dio disse ad Adamo ed Eva, "Siate fecondi e moltiplicatevi, e ricostituire la terra." Un robot che ricevesse lo stesso comando si sentirebbe sconcertato o frustrato. Perché? Perché l'auto-replicazione si è dimostrata sfuggente. Una cosa è costruire un robot, un'altra è costruire un robot in grado di produrre copie di se stesso o rigenerare componenti persi o danneggiati.
interessante, i robot potrebbero non guardare agli umani come modelli riproduttivi. Forse hai notato che in realtà non dividiamo in due pezzi identici. Animali semplici, però, farlo tutto il tempo. I parenti delle meduse note come idra praticano una forma di riproduzione asessuata nota come gemmazione :Una piccola sacca si gonfia verso l'esterno dal corpo del genitore e poi si stacca per diventare una nuova, individuo geneticamente identico.
Gli scienziati stanno lavorando su robot in grado di eseguire questa procedura di clonazione di base. Molti di questi robot sono costruiti da elementi ripetuti, solitamente cubetti, che contengono macchinari identici e il programma per l'autoreplicazione. I cubi hanno magneti sulle loro superfici in modo che possano attaccarsi e staccarsi da altri cubi vicini. E ogni cubo è diviso in due pezzi lungo una diagonale in modo che ogni metà possa ruotare indipendentemente. Un robot completo, poi, è costituito da più cubi disposti in una configurazione specifica. Finché è disponibile una scorta di cubi, un singolo robot può piegarsi, rimuovi i cubi dal suo "corpo" per seminare una nuova macchina e poi raccogli i blocchi dalla scorta finché due robot completamente formati non si trovano uno accanto all'altro.
 Se costruisci robot autonomi letali che non richiedono operatori umani, come programmi esattamente l'etica? © Fang Zhe/Xinhua Press/Corbis
Se costruisci robot autonomi letali che non richiedono operatori umani, come programmi esattamente l'etica? © Fang Zhe/Xinhua Press/Corbis Mentre interagiamo con le persone durante il giorno, prendiamo centinaia di decisioni. In ognuno, pesiamo le nostre scelte contro ciò che è giusto e sbagliato, cosa è giusto e ingiusto. Se vogliamo che i robot si comportino come noi, avranno bisogno di una comprensione dell'etica.
come la lingua, codificare un comportamento etico è una sfida enorme, principalmente perché non esiste un insieme generale di principi etici universalmente accettati. Culture diverse hanno regole di condotta diverse e sistemi di leggi diversi. Anche all'interno delle culture, le differenze regionali possono influenzare il modo in cui le persone valutano e misurano le proprie azioni e le azioni di coloro che le circondano. Cercare di scrivere un manuale di etica rilevante a livello globale che i robot potrebbero utilizzare come strumento di apprendimento sarebbe praticamente impossibile.
Detto questo, i ricercatori sono stati recentemente in grado di costruire robot etici limitando la portata del problema. Per esempio, una macchina confinata in un ambiente specifico:una cucina, dire, o la stanza di un paziente in una struttura di residenza assistita - avrebbe molte meno regole da imparare e avrebbe un ragionevole successo nel prendere decisioni eticamente sane. Per realizzare questo, gli ingegneri robotici inseriscono le informazioni sulle scelte considerate etiche in casi selezionati in un algoritmo di apprendimento automatico. Le scelte si basano su tre criteri a scala mobile:quanto bene risulterebbe un'azione, quanti danni preverrebbe e una misura di equità. L'algoritmo emette quindi un principio etico che può essere utilizzato dal robot mentre prende decisioni. Utilizzando questo tipo di intelligenza artificiale, il tuo robot domestico del futuro sarà in grado di determinare chi in famiglia deve lavare i piatti e chi può controllare il telecomando della TV per la notte.
Insieme alle sue capacità emotive, Nao sa chiaramente come rilassarsi. © Gerd Roth/dpa/Corbis "Le cose migliori e più belle del mondo non possono essere viste e nemmeno toccate. Devono essere sentite con il cuore". Se questa osservazione di Helen Keller è vera, allora i robot sarebbero destinati a perdere il meglio e il bello. Dopotutto, sono bravissimi a percepire il mondo che li circonda, ma non possono trasformare quei dati sensoriali in emozioni specifiche. Non possono vedere il sorriso di una persona cara e provare gioia, o registrare la smorfia di un oscuro sconosciuto e tremare di paura.
Questo, più di ogni altra cosa sulla nostra lista, potrebbe essere la cosa che separa l'uomo dalla macchina. Come si può insegnare a un robot ad innamorarsi? Come puoi programmare la frustrazione, disgusto, stupore o pietà? Vale anche la pena provare?
Alcuni scienziati pensano di sì. Credono che i futuri robot integreranno entrambi i sistemi emotivi cognitivi, e quello, di conseguenza, potranno funzionare meglio, impara più velocemente e interagisci in modo più efficace con gli umani. Credici o no, esistono già prototipi che esprimono una gamma limitata di emozioni umane. Nao, un robot sviluppato da un gruppo di ricerca europeo, ha le qualità affettive di un bambino di 1 anno. Può mostrare felicità, rabbia, paura e orgoglio, il tutto combinando le posture con i gesti. Queste azioni di visualizzazione, derivato da studi su scimpanzé e neonati umani, sono programmati in Nao, ma il robot decide quale emozione mostrare in base alla sua interazione con le persone e gli oggetti vicini. Negli anni a venire, robot come Nao funzioneranno probabilmente in una varietà di ambienti:ospedali, case e scuole - in cui potranno dare una mano e un orecchio comprensivo.
Il robot di "Lost in Space" (la serie TV degli anni '60, non l'orribile film del 1998) vagava nella mia immaginazione mentre scrivevo questo articolo. È stato difficile scrivere di esseri umani che interagiscono con le macchine e non sentire l'avvertimento iconico di The Robot:"Pericolo, Will Robinson, pericolo!" -- riecheggiando nei miei pensieri.














