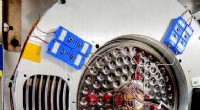
Rappresentazione artistica di Raven che segue un veicolo in avvicinamento alla Stazione Spaziale Internazionale. Credito:Goddard Space Flight Center della NASA
Lancio presto, a bordo della decima missione di rifornimento commerciale SpaceX, sarà un modulo tecnologico chiamato Raven, che avvicinerà la NASA ad avere una relativa capacità di navigazione. Quando apposto all'esterno della Stazione Spaziale Internazionale, Raven testerà tecnologie fondamentali che consentiranno incontri autonomi nello spazio, il che significa che non richiederanno alcun coinvolgimento umano, anche da terra.
Per immaginare perché l'appuntamento autonomo è importante nelle missioni spaziali, immagina questo scenario:un veicolo spaziale che segue un altro satellite, colmare costantemente il divario, con ogni veicolo che viaggia più di 16, 000 miglia all'ora nell'oscurità dello spazio. Il satellite che viene servito, il cliente, è un'imbarcazione multi-tonnellata che sta esaurendo il carburante. Il satellite di manutenzione completamente robotico, il servitore, chiamato Restore-L segue all'inseguimento, trasportando propellente e strumenti che prolungano la vita.
Il cliente, non progettato per essere sottoposto a manutenzione, non ha contrassegni per rendere più facile per il servicer trovarlo e proteggerlo. Il servicer deve farlo da solo, utilizzando un avanzato sistema di visione artificiale, perfezionato utilizzando i dati raccolti da Raven a bordo della stazione spaziale. Il successo della manutenzione dipende innanzitutto dalla capacità del servicer di localizzare con precisione e far corrispondere la velocità con il satellite client.
Per complicare ulteriormente questo scenario, il servicer è lontano dalla Terra, creando un ritardo di comunicazione per il comando e lo scambio di dati da e verso lo spazio. Il ritardo impedisce agli operatori di terra di fornire rapidamente e con precisione comandi al soccorritore al fine di prevenire una possibile collisione negli ultimi piedi del rendez-vous.
Perciò, il servicer deve effettuare la relativa navigazione con il proprio client, e ha bisogno di farlo autonomamente (da solo, senza guida umana), e in tempo reale.
"Il rendezvous autonomo di due veicoli spaziali è cruciale per molte future missioni della NASA e Raven sta maturando questa tecnologia mai tentata prima, " ha detto Ben Reed, vicedirettore della divisione, per la Divisione progetti di assistenza satellitare (SSPD) presso il Goddard Space Flight Center della NASA a Greenbelt, Maryland, l'ufficio che sviluppa e gestisce questa missione dimostrativa.
Raven dimostrerà la capacità di un rivoluzionario sistema di navigazione relativa, alloggiato all'interno del telaio delle dimensioni di un bagaglio a mano, che consentirà a un server spaziale di trovare, e se necessario, catturare il suo obiettivo prefissato. Raven mira a portare a uno sviluppo completo, sistema maturo disponibile per future missioni della NASA.

Modulo tecnologico Raven, pre pranzo. Credito:Goddard Space Flight Center della NASA/Chris Gunn
Cinque giorni dopo il lancio, Raven sarà rimosso dal "tronco" non pressurizzato della navicella spaziale SpaceX Dragon dal braccio robotico Dextre, e fissato su una piattaforma di carico fuori dalla stazione spaziale. Da questo trespolo, Raven inizierà a fornire informazioni per lo sviluppo di un sistema di navigazione relativo in tempo reale maturo.
Durante la sua permanenza a bordo della stazione spaziale, I componenti di Raven uniranno le forze per visualizzare e tracciare in modo indipendente i veicoli spaziali in visita alla stazione spaziale in entrata e in uscita. Per fare questo, I sensori di Raven alimenteranno i dati che "vedono" a un processore, che eseguirà serie di istruzioni (note anche come algoritmi di posa speciali) per misurare la distanza relativa tra Raven e il veicolo spaziale che sta seguendo. Quindi, sulla base di questi calcoli, il processore invierà autonomamente comandi che ruotano il modulo Raven sul suo gimbal, o sistema di puntamento, per mantenere i sensori addestrati sul veicolo, continuando a seguirlo. Mentre queste manovre hanno luogo, NASA operators on the ground will evaluate how Raven's technologies work together as a system, and will make adjustments to increase Raven's tracking performance.
Over its two-year lifespan, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat 7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA's Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD is developing and managing both the Raven and Restore-L demonstration missions.