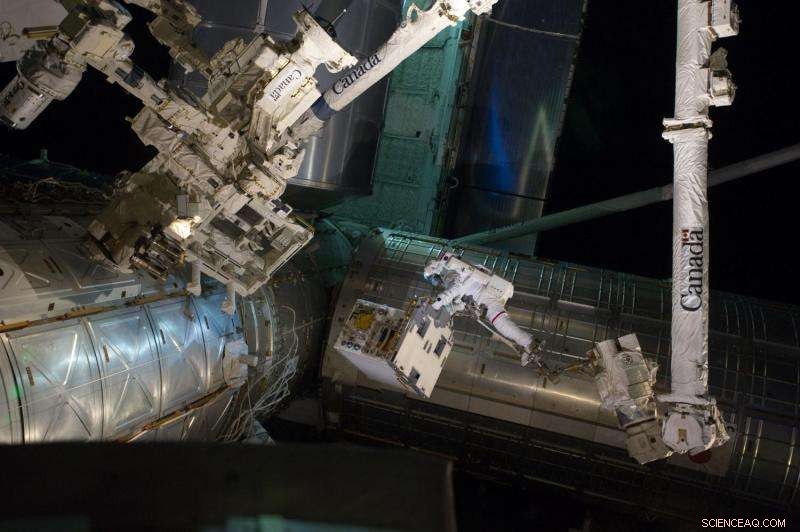
La passeggiata spaziale dell'astronauta Mike Fossum per il carico utile della missione di rifornimento robotico il 12 luglio 2011. Credito:NASA
La Stazione Spaziale Internazionale funge da laboratorio di prova e dimostrazione in orbita per esperimenti scientifici da eseguire all'interno e all'esterno della stazione spaziale. Gli esperimenti sono intrinsecamente transitori con cicli di vita tipici da uno a cinque anni. Una volta raggiunti gli obiettivi del test, vengono rimossi per far posto a nuovi esperimenti.
Il 19 febbraio un esperimento della NASA, un modulo di prova chiamato Raven, è stato lanciato con successo su SpaceX-10/Dragon e installato all'esterno della stazione, dove testerà le tecnologie del pilota automatico per i veicoli spaziali. Mentre il carico utile di Raven si posava sulla stazione, un'altra creazione della Divisione progetti di assistenza satellitare (SSPD):il carico utile della missione di rifornimento robotico (RRM), partito. A bordo del baule del drago in cui è arrivata Raven, RRM è tornato sulla Terra il 19 marzo, dove rientrava nell'atmosfera. Sebbene entrambi i carichi utili fossero e siano fondamentali per il progresso della manutenzione dei satelliti, dopo che RRM ha servito il suo scopo e raggiunto i suoi obiettivi, era giunto il momento per RRM di lasciare la stazione e far posto a nuovi esperimenti.
RRM ha stabilito una solida eredità nella dimostrazione delle capacità di assistenza satellitare e che l'assistenza in orbita è tecnologicamente pronta per l'implementazione. RRM è stato lanciato nel luglio 2011 a bordo dell'ultimo volo dello space shuttle ed è stato l'ultimo carico utile ad essere rimosso dalla stiva dello shuttle da un astronauta. Successivamente è stato montato all'esterno su un corriere logistico espresso costruito presso il Goddard Space Flight Center della NASA a Greenbelt, Maryland. RRM ha dimostrato e testato gli strumenti, tecnologie e tecniche necessarie per rifornire e riparare roboticamente i satelliti nello spazio che non sono stati progettati per essere sottoposti a manutenzione.
La missione di rifornimento robotico è stata un ponte essenziale tra la manutenzione con equipaggio effettuata nelle missioni di assistenza Hubble e la manutenzione robotica che sarà dimostrata nella prossima missione Restore-L, " ha detto Ben Reed, vicedirettore della divisione SSPD. "Il nostro team ha lavorato molto duramente per sviluppare la suite di strumenti ed esperimenti RRM e siamo estremamente lieti di vedere cosa hanno realizzato. Siamo ansiosi di applicare le lezioni apprese da RRM alla missione Restore-L e ai futuri sforzi di assistenza".
Correva l'anno 2010 quando iniziò la pianificazione di RRM. La quarta missione di manutenzione del telescopio spaziale Hubble era appena terminata. La navetta spaziale era al tramonto della sua carriera, previsto per il pensionamento nel 2011. Le centinaia di ingegneri di Goddard che avevano supportato la manutenzione di Hubble non erano sicure di cosa avrebbe riservato un futuro senza navetta. Una squadra, guidato dal "padre del servizio" Frank Cepollina, ha iniziato a pensare a come continuare la manutenzione senza navetta. Senza tempo da perdere, Il team di Cepollina ha stabilito che il futuro della manutenzione si baserebbe sulla robotica e il braccio robotico della stazione spaziale era il meccanismo migliore per testare e sviluppare tecniche di manutenzione robotica. Diciotto mesi dopo, estremamente veloce per un progetto di questa complessità, RRM era nella stiva dello space shuttle Atlantis, pronto a lanciare e dimostrare al mondo che l'assistenza robotica è diventata maggiorenne.
"La stazione spaziale è in orbita e ha già un robot, " ha detto Frank Cepollina, il precedente direttore associato della SSPD. "La stazione spaziale è stata realizzata su misura per RRM e ha funzionato magnificamente come banco di prova per la manutenzione".
Il carico utile RRM delle dimensioni di una lavatrice ospitava quattro strumenti unici che sono stati utilizzati dal robot canadese "Dextre" a doppio braccio della stazione per eseguire il preciso, compiti complessi necessari per rifornire un satellite. Queste attività includevano il taglio e la rimozione di coperte termiche, svitando più tappi, l'accesso alle valvole e il trasferimento di un combustibile satellitare simulato. Nel gennaio 2013, con questo trasferimento di fluidi nello spazio, RRM ha confermato che l'attuale tecnologia robotica potrebbe rifornire una valvola del carburante satellitare a tripla tenuta, travaso 1,7 litri di etanolo.
In lanci separati nel 2013 e 2014, due nuove task board e uno strumento sono stati inviati alla stazione spaziale come parte della "Fase 2" di RRM. Le task board hanno ulteriormente dimostrato le attività vitali per la manutenzione dei satelliti in volo libero. Allo stesso modo, il nuovo strumento, il robot invertebrato posabile per ispezione visiva, o VIPIR, ha mostrato lo stato dell'arte di un'ispezione vicina e media utilizzando un dispositivo articolabile, strumento endoscopio "a forma di serpente".
Attraverso queste due fasi e più giorni di attività, il team RRM ha unito le forze e si è costantemente comportato sotto pressione. Insieme hanno creato un carico utile e completato una missione fondamentale per il futuro della manutenzione dei satelliti. Attualmente, stanno sviluppando e lavorando per eseguire una terza fase di RRM, che continuerà a far progredire la tecnologia necessaria per il rifornimento robotico. RRM 3 si concentrerà specificamente sulla manutenzione delle interfacce del fluido criogenico e del gas xeno che supporteranno le future missioni scientifiche man mano che gli esseri umani estendono ulteriormente la loro esplorazione nel nostro sistema solare.
"La stazione spaziale è stata una struttura meravigliosa per testare le nostre tecnologie, e sappiamo che la partenza di RRM farà spazio ad un altro grande esperimento, " ha detto Jill McGuire, Responsabile del progetto RRM. "Siamo orgogliosi di ciò che abbiamo realizzato con RRM, e siamo entusiasti di contribuire alle prossime fasi dell'abilitazione della manutenzione dei satelliti robotici".