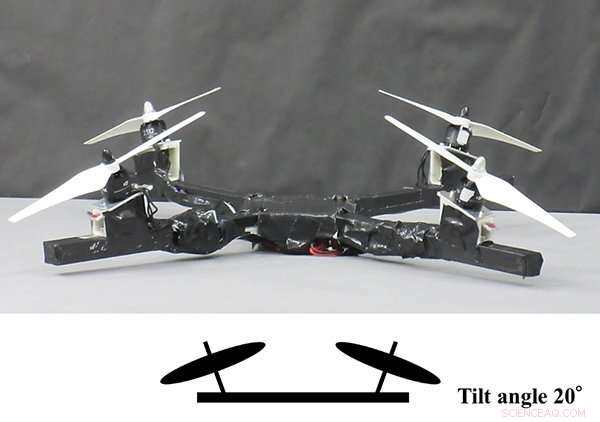
Configurazione quadrirotore con rotore piastrellato sul lato esterno. Credito:Hikaru Otsuka
La prevalenza di droni multirotore è aumentata notevolmente negli ultimi anni, ma con vento contrario, si inclinano verso l'alto in modo imprevedibile. Ingegneri dell'Università di Tohoku, Giappone, hanno dimostrato che l'inclinazione delle pale del rotore di un veicolo aereo senza pilota a quattro rotori di soli 20 gradi può ridurre il beccheggio di un quarto. Il loro lavoro è pubblicato nel Rivista internazionale di microveicoli aerei .
I multi-rotori sono diventati molto più piccoli dall'inizio del secolo, e hanno molti usi, anche per l'ispezione, sorveglianza e trasporto. Una configurazione multi-rotore consente sia il decollo verticale che il volo stazionario in condizioni di calma, ma sono instabili al vento. I loro rotori sbattono e il veicolo si lancia verso l'alto con vento contrario. In questo esperimento, Hikaru Otsuka e colleghi hanno deciso di valutare se un'angolazione diversa delle pale del rotore potrebbe migliorare il controllo dei veicoli a quattro rotori in presenza di vento.
Il beccheggio può verificarsi a causa di tre fattori:la resistenza del corpo, l'asimmetria indotta dalla distribuzione del flusso sul rotore con il vento, e la differenza di spinta del rotore tra i rotori anteriore e posteriore. Il team ha prima stimato gli effetti della scia dei rotori anteriori sul retro, quindi ha isolato i rotori dal veicolo e ha misurato l'effetto di diversi angoli in una galleria del vento a bassa velocità. Mostrano che l'inclinazione dei rotori sul lato esterno di 75 gradi ha mantenuto il flusso d'aria che passava per ciascuna pala del rotore isolato, ma aumentare l'angolo a 90 o più significava che la scia dei rotori anteriori influenzava il posteriore.
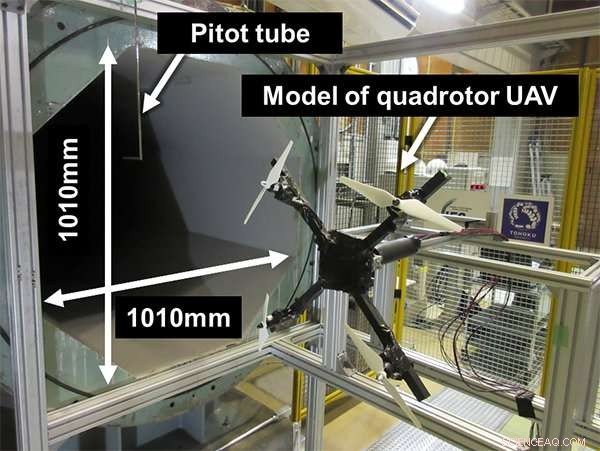
Allestimento dell'esperimento in galleria del vento. Credito:Hikaru Otsuka
Quindi hanno analizzato come questo si è tradotto in un quadrirotore completo con tutti e quattro i rotori che lavorano insieme. Nella galleria del vento, il team ha testato vari angoli di attacco del rotore al quadrirotore e l'effetto sulla generazione del momento di beccheggio. Hanno misurato gli effetti dell'inclinazione verso l'esterno e verso l'interno delle pale del rotore per cinque diversi angoli. Hanno scoperto che l'inclinazione del rotore di 20 verso il lato esterno riduce il passo del veicolo del 26%.
Gli autori concludono che l'inclinazione dei rotori sul lato esterno riduce il momento di beccheggio dei veicoli a quattro rotori nei venti. Il lavoro potrebbe avere risvolti sia per gli hobbisti che per i professionisti che vogliono utilizzare all'aperto veicoli senza pilota multirotore, per quanto riguarda le ispezioni delle turbine eoliche, siti di disastri, o per la sicurezza delle attività di soccorso.