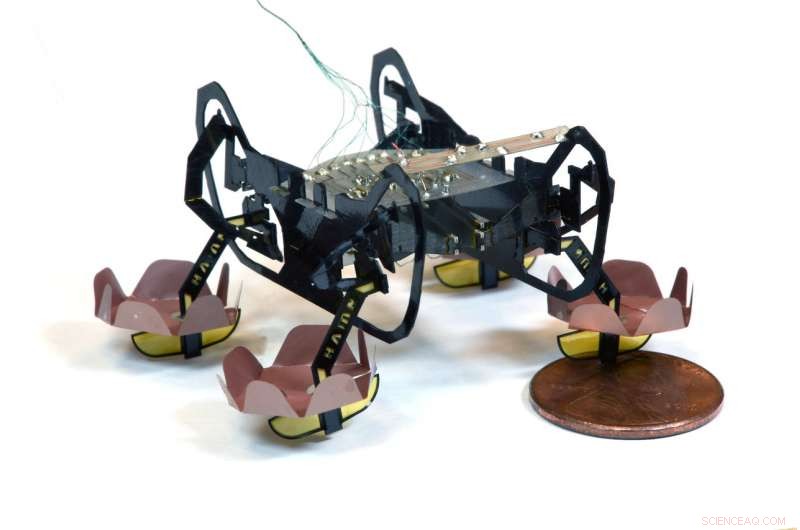
La prossima generazione di microrobot ambulatoriali (HAMR) di Harvard può camminare sulla terraferma, nuotare sulla superficie dell'acqua, e camminare sott'acqua, aprendo nuovi ambienti da esplorare per questo piccolo bot. Credito:Yufeng Chen, Neel Doshi, e Benjamin Goldberg/Università di Harvard
In natura, gli scarafaggi possono sopravvivere sott'acqua fino a 30 minuti. Ora, uno scarafaggio robotico può fare ancora meglio. Microrobot ambulatoriale di Harvard, noto come HAMR, può camminare sulla terra, nuotare sulla superficie dell'acqua, e camminare sott'acqua per tutto il tempo necessario, aprendo nuovi ambienti da esplorare per questo piccolo bot.
Questo HAMR di nuova generazione utilizza imbottiture multifunzionali per i piedi che si basano sulla tensione superficiale e sulla galleggiabilità indotta dalla tensione superficiale quando HAMR ha bisogno di nuotare, ma può anche applicare una tensione per rompere la superficie dell'acqua quando HAMR deve affondare. Questo processo è chiamato elettrowetting, che è la riduzione dell'angolo di contatto tra un materiale e la superficie dell'acqua sotto una tensione applicata. Questo cambiamento dell'angolo di contatto rende più facile per gli oggetti rompere la superficie dell'acqua.
Muoversi sulla superficie dell'acqua consente a un microrobot di eludere gli ostacoli sommersi e riduce la resistenza. Utilizzando quattro paia di flap asimmetrici e andature da nuoto progettate su misura, Robo-paddle HAMR sulla superficie dell'acqua per nuotare. Sfruttando l'interazione instabile tra le alette passive del robot e l'acqua circostante, il robot genera andature natatorie simili a quelle di uno scarabeo tuffatore. Ciò consente al robot di nuotare efficacemente in avanti e girarsi.
"Questa ricerca dimostra che la microrobotica può sfruttare la fisica su piccola scala, in questo caso la tensione superficiale, per eseguire funzioni e capacità che sono impegnative per i robot più grandi, "ha detto Kevin Chen, un borsista post-dottorato presso la Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) e primo autore dell'articolo.

I poggiapiedi multifunzionali di HAMR si basano sulla tensione superficiale e sulla galleggiabilità indotta dalla tensione superficiale quando HAMR ha bisogno di nuotare, ma possono anche applicare una tensione per rompere la superficie dell'acqua quando HAMR deve affondare. Credito:Yufeng Chen, Neel Doshi, e Benjamin Goldberg/Università di Harvard
La ricerca più recente è pubblicata sulla rivista Comunicazioni sulla natura .
"Le dimensioni di HAMR sono fondamentali per le sue prestazioni, " disse Neel Doshi, studente laureato presso SEAS e coautore del paper. "Se fosse molto più grande, sarebbe difficile sostenere il robot con la tensione superficiale e se fosse molto più piccolo, il robot potrebbe non essere in grado di generare una forza sufficiente per romperlo."
HAMR pesa 1,65 grammi (circa quanto una grande graffetta), può trasportare 1,44 grammi di carico utile aggiuntivo senza affondare e può remare le gambe con una frequenza fino a 10 Hz. È rivestito in parylene per evitare che si cortocircuiti sott'acqua.
Una volta sotto la superficie dell'acqua, HAMR usa la stessa andatura per camminare come fa sulla terraferma ed è altrettanto mobile. Per tornare alla terraferma, HAMR deve affrontare un'enorme sfida dalla stiva dell'acqua. Una forza di tensione superficiale dell'acqua che è il doppio del peso del robot spinge verso il basso il robot, e inoltre la coppia indotta provoca un drammatico aumento dell'attrito sulle zampe posteriori del robot. I ricercatori hanno irrigidito la trasmissione del robot e installato cuscinetti morbidi sulle gambe anteriori del robot per aumentare la capacità di carico utile e ridistribuire l'attrito durante l'arrampicata. Finalmente, salendo per una modesta pendenza, il robot è in grado di uscire dalla stiva dell'acqua.
"Questo robot illustra bene alcune delle sfide e delle opportunità con i robot su piccola scala, " ha detto l'autore senior Robert Wood, Charles River Professore di Ingegneria e Scienze Applicate presso SEAS e membro principale della facoltà dell'Harvard Wyss Institute for Biologically Inspired Engineering. "Il restringimento offre opportunità per una maggiore mobilità, come camminare sulla superficie dell'acqua, ma anche sfide poiché le forze che diamo per scontate su scale più grandi possono iniziare a dominare alle dimensioni di un insetto".
Prossimo, i ricercatori sperano di migliorare ulteriormente la locomozione di HAMR e trovare un modo per tornare a terra senza una rampa, magari incorporando adesivi ispirati ai gechi o meccanismi di salto impulsivi.