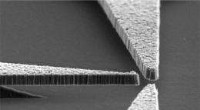
La struttura è costituita da più strati di materiale flessibile avvolti in un involucro di plastica e collegati a una fonte di vuoto. Attestazione:Yashraj Narang/Harvard SEAS
Anche i polpi capiscono l'importanza dei gomiti. Quando questi squishy, i cefalopodi dalle membra sciolte hanno bisogno di fare un movimento preciso, come guidare il cibo nella loro bocca, i muscoli nei loro tentacoli si contraggono per creare un'articolazione revoluta temporanea. Queste articolazioni limitano l'oscillazione del braccio, consentendo movimenti più controllati.
Ora, ricercatori della Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) e del Wyss Institute for Biologically Inspired Engineering hanno dimostrato come una struttura multistrato può consentire ai robot di imitare la cinematica del polpo, creazione ed eliminazione di giunti a comando. La struttura può anche consentire ai robot di modificare rapidamente la propria rigidità, smorzamento, e dinamica.
La ricerca è stata pubblicata in due articoli in Materiali funzionali avanzati e Lettere IEEE sulla robotica e l'automazione .
"Questa ricerca aiuta a colmare il divario tra la robotica morbida e la robotica rigida tradizionale, " disse Yashraj Narang, primo autore di entrambi gli studi e laureato presso SEAS. "Riteniamo che questa classe di tecnologia possa favorire una nuova generazione di macchine e strutture che non possono essere semplicemente classificate come morbide o rigide".
La struttura è sorprendentemente semplice, costituito da più strati di materiale flessibile avvolto in un involucro di plastica e collegato a una fonte di vuoto. Senza vuoto, la struttura si comporta esattamente come ci si aspetterebbe, piegarsi, torcendosi e svolazzando senza mantenere la forma. Ma quando viene applicato un vuoto, diventa rigido e può contenere forme arbitrarie, e può essere modellato in forme aggiuntive.
Questa transizione è il risultato di un fenomeno chiamato jamming laminare, in cui l'applicazione della pressione crea attrito che accoppia fortemente un gruppo di materiali flessibili.
"Le forze di attrito generate dalla pressione agiscono come colla, " disse Narang. "Possiamo controllare la rigidità, smorzamento, cinematica, e dinamica della struttura modificando il numero di strati, sintonizzando la pressione applicata ad esso, e regolando la spaziatura tra più pile di livelli."
Il gruppo di ricerca, che comprendeva anche Robert Howe, l'Abbott e James Lawrence Professore di Ingegneria, Joost Vlassak, l'Abbott e James Lawrence Professore di Ingegneria dei Materiali, e Alperen Degirmenci, uno studente laureato in SEAS, ha ampiamente modellato il comportamento meccanico dell'inceppamento laminare per controllarne meglio le capacità.
Prossimo, hanno costruito dispositivi del mondo reale utilizzando le strutture, inclusa una pinza a due dita che, senza vuoto, potrebbe avvolgere e trattenere oggetti di grandi dimensioni e, con il vuoto, potrebbe pizzicare e trattenere piccoli oggetti delle dimensioni di una biglia.
I ricercatori hanno anche dimostrato le capacità della struttura come ammortizzatori attaccandoli a un drone come carrello di atterraggio. Il team ha messo a punto la rigidità e lo smorzamento delle strutture per assorbire l'impatto dell'atterraggio.
La struttura è un proof-of-concept che potrebbe avere molte applicazioni in futuro, dai robot chirurgici ai dispositivi indossabili e agli altoparlanti flessibili.
"Il nostro lavoro ha spiegato il fenomeno dell'inceppamento laminare e mostrato come può fornire ai robot un comportamento meccanico altamente versatile, " disse Howe, autore senior del documento. "Riteniamo che questa tecnologia alla fine porterà a robot in grado di cambiare stato tra soft, dispositivi continui che possono interagire in sicurezza con l'uomo, e rigido, dispositivi discreti in grado di soddisfare le esigenze dell'automazione industriale."