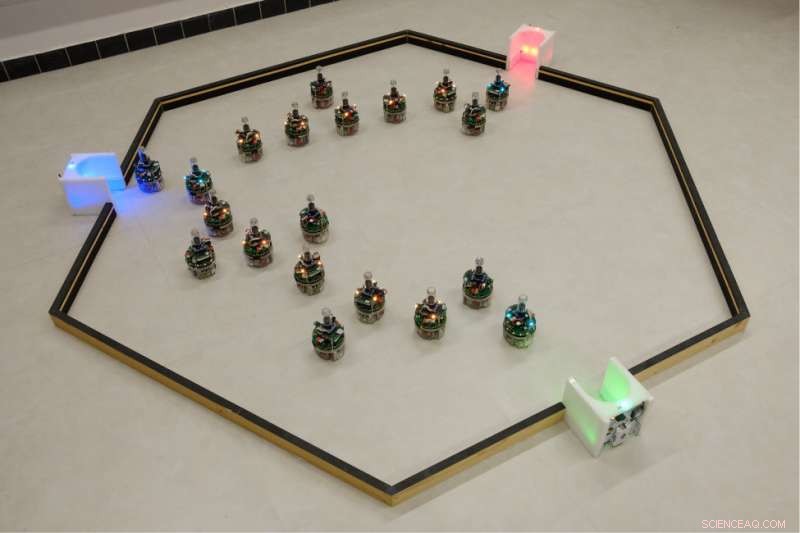
TS-Swarm nella sua arena con tre cabine. Crediti:Garattoni e Birattari, Sci. Robot. 3, mangiare0430 (2018)
I robot potrebbero presto aiutare le squadre di soccorso a salvare i sopravvissuti a un disastro naturale? Una tale missione richiederebbe che i robot siano in grado di determinare, da soli, quali compiti svolgere e in quale ordine svolgerli; ad esempio, è inutile tentare di estrarre una vittima dalle macerie se le macerie non sono ancora state rimosse. Attualmente, gli ingegneri sono responsabili della programmazione della sequenza delle azioni. Ma questo potrebbe presto cambiare!
Mauro Birattari e Lorenzo Garattoni, ricercatori del laboratorio IRIDIA (Scuola di Ingegneria di Bruxelles, Université Libre de Bruxelles), hanno recentemente dimostrato che i robot sono in grado di decidere collettivamente in quale ordine devono completare i loro compiti. I risultati della loro ricerca sono pubblicati in Robotica scientifica questo mercoledì, luglio18.
I ricercatori del laboratorio IRIDIA hanno basato il loro studio sulla robotica a sciame, una branca della robotica che attinge al comportamento collettivo e organizzato degli animali sociali (come le formiche) per creare gruppi di robot che esibiscono intelligenza artificiale. I robot sono attualmente in grado di comunicare e coordinarsi per prendere decisioni e svolgere compiti semplici, come spostare un oggetto o scegliere uno dei due percorsi. Per le loro ultime ricerche, Mauro Birattari e Lorenzo Garattoni hanno fatto un passo avanti in termini di complessità:hanno creato uno sciame di robot in grado di compiere una sequenza di tre azioni, senza conoscere in anticipo l'ordine corretto. In pratica, i robot dovevano spostarsi in tre punti diversi nello spazio, dove dovevano svolgere un compito semplice. Solo dopo che le attività erano state completate, i robot avrebbero appreso se l'ordine era corretto. Per risolvere questo problema, alcuni dei robot formano gradualmente una catena tra i tre punti nello spazio, che gli altri usano come guida mentre testano le varie combinazioni possibili seguendo le indicazioni dei robot che compongono la catena (vedi foto). Infine, determinano la sequenza corretta lavorando insieme.
Questo studio dimostra, per la prima volta, che i robot sono in grado di determinare collettivamente una sequenza di azioni il cui ordine richiesto era precedentemente sconosciuto. Questa capacità di pianificare in anticipo è considerata un'abilità cognitiva complessa, ed emerge dalle interazioni tra gli individui del gruppo:insieme, i robot sono in grado di pianificare una sequenza di azioni, che nessun individuo del gruppo sarebbe in grado di fare da solo.
Questa ricerca apre la strada a una serie di potenziali applicazioni che coinvolgono un gruppo di robot "intelligenti", ovvero robot in grado di risolvere i problemi da soli. Le possibilità che i ricercatori anticipano includono la ricerca di sopravvissuti dopo un disastro naturale, esplorare ambienti sconosciuti o ostili, strutture edilizie in siti pericolosi, e varie applicazioni in agricoltura. La capacità, dimostrata in questo studio, di determinare autonomamente l'ordine in cui devono essere completati i compiti è essenziale per questo tipo di missioni.
Mauro Birattari è vincitore di un ERC Consolidator Grant. Questa ricerca è stata condotta per il progetto ERC "DEMIURGE:progettazione automatica di sciami di robot".