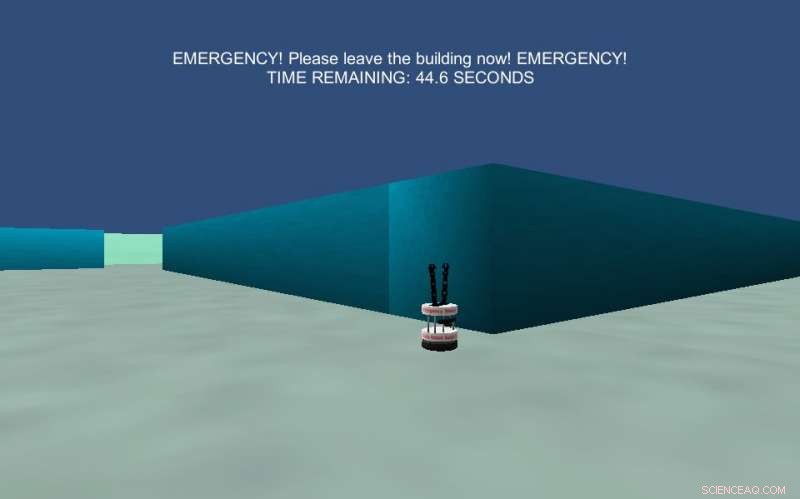
L'immagine raffigura un esperimento di navigazione nel labirinto che è stato descritto come una situazione di emergenza. Ai partecipanti è stato detto che il loro compito era agire come se si trovassero in un'evacuazione di emergenza e che dovessero trovare un'uscita entro 30 secondi per sopravvivere. Credito:Wagner et al.
Ricercatori della Pennsylvania State University, Il MIT e il Georgia Institute of Technology hanno recentemente sviluppato un quadro concettuale per modellare il fenomeno della fiducia uomo-robot. Il loro quadro, delineato in un articolo pubblicato su ACM Digital Library, utilizza rappresentazioni computazionali ispirate alla teoria dei giochi per rappresentare la fiducia, una nozione definita usando la teoria in psicologia sociale.
La fiducia gioca un ruolo chiave nelle interazioni interpersonali, sia in ambito professionale che personale. Quando una persona si fida di un'altra, potrebbero decidere di fare qualcosa che li mette a rischio considerevole, ritenendo che le azioni dell'altro mitigheranno in qualche modo questo rischio.
Quando si tratta di definire la fiducia, molti ricercatori concordano sul fatto che comporta una situazione in cui un individuo è vulnerabile e questa vulnerabilità dipende dalle azioni, motivazioni, o comportamenti di un altro. Alan R. Wagner, Paolo Robinetta, e Ayanna Howard, i tre ricercatori dietro il recente studio, voleva creare una struttura che potesse essere utilizzata per modellare la fiducia interpersonale tra umani e robot.
"Siamo interessati a sviluppare robot che sappiano quando fidarsi degli umani, capire quali situazioni richiedono fiducia e attrarre la giusta quantità di fiducia dagli esseri umani, " ha spiegato Robinette. "Inizialmente, siamo stati motivati dalla ricerca che suggerisce che a volte le persone fanno cose strane quando un robot glielo chiede, come buttare via costosi libri di testo e versare succo d'arancia su una pianta in vaso. Esiste anche un numero crescente di situazioni in cui gli esseri umani si mettono a rischio nelle mani di un robot (ad esempio automobili autonome, droni che volano in alto, guardie di sicurezza robot, eccetera.). Volevamo quindi sviluppare un framework che consentisse ai robot di comprendere le relazioni di fiducia con gli umani".
Il quadro concettuale sviluppato da Wagner e dai suoi colleghi ha generato diverse ipotesi verificabili relative alla fiducia uomo-robot. Nel loro studio, i ricercatori hanno esaminato queste ipotesi generate e hanno condotto una serie di esperimenti, raccogliendo sia le prove che sostenevano la loro struttura sia che erano in conflitto con essa.
"Il quadro di fiducia è iniziato nella ricerca di Alan, che ha definito la fiducia in un modo in cui i computer, e quindi robot, può utilizzare, " disse Robinetta.
Nel suo lavoro precedente, Wagner definì la fiducia situazionale come "una credenza, detenuto dal fiduciante, che il fiduciario agirà in modo da mitigare il rischio del fiduciante in una situazione in cui il fiduciante ha messo a rischio i suoi risultati». La sua definizione si concentra principalmente sul rischio insito in una data situazione, evidenziando anche la convinzione che una persona/robot agirà per ridurre il rischio per l'altra persona/robot.
"Il nostro framework fornisce criteri per ciò che costituisce una situazione di fiducia e fornisce diverse categorie di situazioni che non richiedono fiducia, ad esempio quando non vi è alcun rischio per il fiduciante o quando il rischio non può essere mitigato per un motivo o per l'altro, " ha detto Robinette. "Con questo quadro, un robot può valutare da solo se la situazione in cui si trova richiede fiducia o meno, e poi agire in modo appropriato".
I ricercatori hanno testato le ipotesi generate dal loro framework in una serie di test ed esperimenti. Ad esempio, in un esperimento, hanno presentato a un gruppo di partecipanti umani scenari che implicavano la fiducia o la non fiducia in qualcun altro, poi ha chiesto loro quale di queste due opzioni avrebbero scelto. I partecipanti hanno concordato con le condizioni di fiducia generate dal loro quadro, ad un livello molto alto.
I ricercatori hanno condotto diversi altri esperimenti che hanno valutato l'accuratezza delle ipotesi generate dal loro quadro concettuale. Alcuni di questi hanno raccolto prove a sostegno di queste ipotesi, mentre alcuni hanno prodotto risultati contrastanti.
"Penso che la scoperta più significativa di questo lavoro sia che abbiamo trovato notevoli prove a sostegno di questo quadro in studi con molti partecipanti di diversa estrazione, " ha detto Robinette. "Ciò significa che il quadro di fiducia può essere utilizzato nella maggior parte delle situazioni, permettendo ai robot di capire meglio perché gli umani intorno a loro si comportano come loro. Il robot potrebbe persino essere in grado di utilizzare questa struttura per guidare gli umani verso situazioni meno rischiose, per esempio riconoscendo che una persona ripone troppa fiducia in un robot, forse per fare qualcosa per cui non era programmato, e informare la persona del loro errore."
La struttura ideata da Wagner e dai suoi colleghi potrebbe essere applicata a una varietà di situazioni che implicano la fiducia tra umani e robot. Tuttavia, in alcuni casi le ipotesi del framework non erano sufficientemente accurate, per esempio quando alle persone è stato chiesto di fidarsi di un robot in quella che sembrava essere una situazione di emergenza.
Questi risultati sono comunque preziosi, poiché fanno luce su aree specifiche in cui le persone trovano più difficile fidarsi dei robot. La ricerca futura potrebbe dare un'occhiata più da vicino al motivo per cui i partecipanti hanno fatto queste scelte e cosa ha impedito loro di fidarsi dei robot, esplorando anche i modi in cui gli ingegneri robotici possono migliorare la sicurezza intorno ai robot.
"Alan e Ayanna hanno lavorato per estendere questa ricerca al dominio della robotica sanitaria, " ha detto Robinette. "Credo che Alan abbia anche un progetto per indagare sui robot di evacuazione di emergenza e il loro rapporto con le persone in modo più dettagliato. Di recente ho lavorato sul lavoro di squadra uomo-macchina e ho intenzione di applicare questo quadro di fiducia alla relazione tra gli esseri umani e i robot con cui lavorano".
© 2018 Science X Network