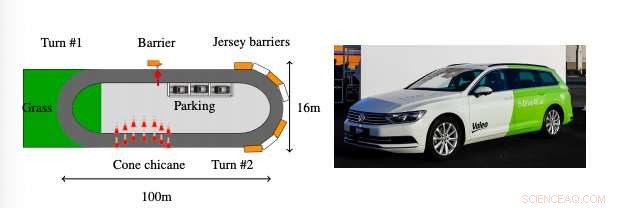
Pista di prova (a sinistra) e auto dimostrativa utilizzata (a destra). Credito:Wirbel et al.
Ricercatori di Valeo, un'azienda tecnologica specializzata nell'innovazione automobilistica, hanno recentemente sviluppato un sistema di apprendimento dell'imitazione end-to-end per il controllo della velocità dell'auto. Il loro approccio, delineato in un documento pre-pubblicato su arXiv, utilizza una rete neurale con memoria a lungo termine (LSTM), un tipo di rete neurale ricorrente (RNN) in grado di apprendere dipendenze a lungo termine.
"Valeo è il leader mondiale nei sensori, le orecchie e gli occhi delle auto a guida autonoma, e ha già ottenuto diversi primati mondiali, come la recente sperimentazione con il nostro veicolo Valeo Drive4U, la prima auto autonoma ad essere dimostrata per le strade di Parigi, "Emilie Wirbel, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Io e il mio team lavoriamo in uno dei 56 centri di ricerca e sviluppo dell'azienda, indagando su come l'apprendimento profondo può essere utilizzato per ottenere una migliore decisione e controllo delle auto a guida autonoma. L'obiettivo di questa ricerca era dimostrare che è possibile gestire situazioni complesse che si possono incontrare negli ambienti urbani utilizzando solo telecamere e imparando da ciò che può fare un guidatore umano".
Il nuovo sistema sviluppato da Wirbel e dai suoi colleghi utilizza una rete neurale artificiale (ANN) che si basa su tecniche di deep learning. La rete è alimentata da dimostrazioni di un essere umano alla guida di un'auto che vengono riprese da una telecamera frontale e quindi assomigliano molto a ciò che la persona stava vedendo durante la guida.
La rete neurale viene quindi addestrata a imitare le azioni del conducente, concentrandosi in particolare sulla riproduzione della velocità attuale dell'auto. Ad esempio, quando un'immagine di input contiene un pannello del limite di velocità di 50 km/h, la rete assicura che l'auto non superi i 50 km/h.
"Quando c'è un'altra macchina davanti a noi, un guidatore umano rallenterà di conseguenza e la rete dovrebbe imparare a fare lo stesso, " ha spiegato Wirbel. "Il nostro approccio cerca di replicare come un essere umano apprende e guida. La rete riceve informazioni solo dalla telecamera frontale e non necessita di una percezione esplicita, Per esempio, relative ai semafori o alle corsie, proprio come un guidatore umano non ha un modello esplicito di dove siano esattamente le linee e quale sia la loro forma."
Dopo aver addestrato la loro rete neurale, Wirbel e i suoi colleghi lo hanno testato in un ambiente di simulazione e poi l'hanno integrato all'interno di un'auto reale, valutando le sue prestazioni su una pista di prova impegnativa. Hanno scoperto che il loro sistema reagiva efficacemente a situazioni complesse, controllare la velocità della vettura ove necessario (es. rallentamento ai coni stradali e curve strette, fermandosi alle barriere e avvicinandosi ai segnali di pericolo, eccetera.).
"Il nostro studio dimostra che situazioni complesse, come zone di lavoro, ostacoli imprevisti, eccetera., può essere affrontato semplicemente osservando ciò che farebbe un essere umano e poi riproducendolo in una nuova, situazioni simili, " ha detto Wirbel. "Ciò significa che finché disponiamo di dati dimostrativi sufficienti, siamo in grado di gestire casi d'uso che i conducenti umani dovrebbero ragionevolmente affrontare. Questo potrebbe essere utilizzato in complesse situazioni di interazione in combinazione con gli approcci più classici, per rendere il veicolo in grado di reagire in modo coerente e intelligente."
Il sistema ideato da Wirbel e dai suoi colleghi ha ottenuto risultati molto promettenti e potrebbe presto essere applicato ai veicoli autonomi, portando a un controllo della velocità più efficace e a una guida più intuitiva. I ricercatori stanno progettando di estendere la loro prova di concetto a situazioni più complesse, insegnando al loro sistema a gestire una più ampia varietà di interazioni con altri veicoli sulla strada, oltre ad aggiungere manovre più complesse, come cambiare corsia, svoltando agli incroci, o la navigazione nelle rotonde.
"Vorremmo anche lavorare sulla spiegabilità e compatibilità del sistema con i veicoli autonomi esistenti, fornire una spiegazione all'utente finale di come la rete percepisce il suo ambiente e perché prende le sue decisioni, " ha aggiunto Wirbel. "La tabella di marcia della ricerca è molto ampia, quindi partecipiamo e contribuiamo a importanti conferenze scientifiche per stare al passo con gli ultimi sviluppi dell'arte in questo settore. Il nostro ruolo come team di ricerca e sviluppo è anche quello di fornire al resto di Valeo le chiavi e le competenze giuste per portare le nostre prove di concetto più vicine alla produzione".
© 2019 Science X Network