Prese di precisione (a sinistra) e di potenza (a destra) generate dal pianificatore di presa. Credito:Lu &Hermans.
I ricercatori dell'Università dello Utah hanno recentemente sviluppato un pianificatore probabilistico di presa in grado di modellare esplicitamente i tipi di presa per pianificare in tempo reale prese di precisione e potenza di alta qualità. Il loro approccio di apprendimento supervisionato, delineato in un documento pre-pubblicato su arXiv, può pianificare efficacemente sia le prese di potenza che quelle di precisione per un dato oggetto.
Sia per gli umani che per i robot, diversi compiti di manipolazione richiedono diversi tipi di presa. Ad esempio, impugnando uno strumento pesante, come un martello, richiede una presa di potere a più dita che offra stabilità, mentre tenere una penna richiede una presa di precisione a più dita, in quanto ciò può conferire destrezza all'oggetto.
Quando si testa il loro approccio precedente per comprendere la pianificazione, il team di ricercatori dell'Università dello Utah ha notato che quasi sempre generava energia afferra in cui la mano del robot si avvolge attorno a un oggetto, con ampie zone di contatto tra la sua mano e l'oggetto. Queste prese sono utili per completare una varietà di compiti robotici, come raccogliere oggetti da qualche altra parte nella stanza, tuttavia non sono utili quando si eseguono attività di manipolazione manuale.
"Pensa a spostare un pennello o un bisturi che stai tenendo con la punta delle dita, "Tucker Hermans, uno dei ricercatori che ha condotto lo studio, ha detto a TechXplore. "Questo tipo di compiti richiede una presa di precisione, dove il robot tiene l'oggetto con la punta delle dita. Guardando la letteratura, abbiamo visto che i metodi esistenti tendono a generare un solo tipo di comprensione, o precisione o potenza. Quindi abbiamo deciso di creare un approccio di sintesi in grado di gestire entrambi. Per di qua, il nostro robot può usare le prese elettriche per raccogliere e posizionare stabilmente gli oggetti che vuole spostare, ma la precisione coglie quando deve eseguire compiti di manipolazione manuale."
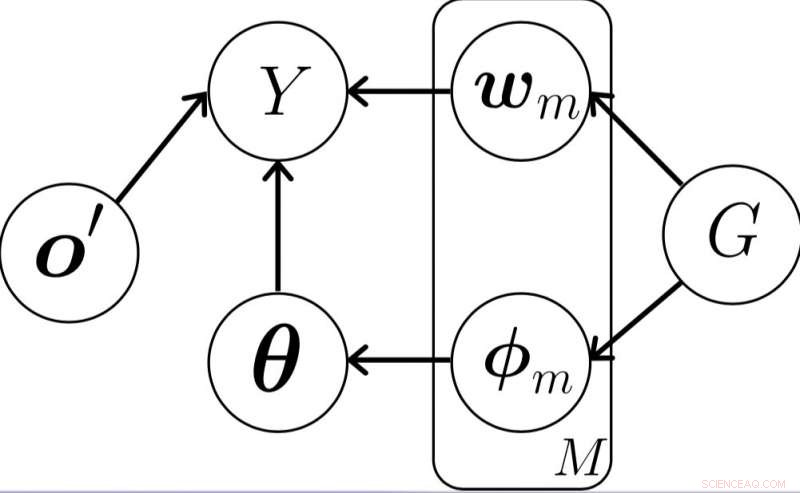
Il modello grafico probabilistico di tipo grab proposto. Credito:Lu &Hermans.
Nell'approccio alla comprensione della pianificazione ideato da Hermans e dal suo collega Qingkai Lu, un robot impara a prevedere il successo dalle esperienze passate. Il robot tenta diversi tipi di presa su oggetti diversi, registrando quali di questi hanno avuto successo e quali hanno fallito. Questi dati vengono quindi utilizzati per addestrare un classificatore a prevedere se una data presa avrà successo o meno.
"Il classificatore prende come input un'immagine di profondità dell'oggetto e la configurazione di presa selezionata (ovvero dove mettere la mano e come modellare le dita), " ha spiegato Hermans. "Oltre a prevedere il successo, il classificatore riporta quanto è sicuro che la presa avrà successo su una scala da zero a uno. Quando gli viene presentato un oggetto da afferrare, il robot pianifica una presa cercando tra diverse possibili prese e selezionando la presa che il classificatore prevede la massima fiducia nel successo."
L'approccio di apprendimento supervisionato sviluppato da Hermans e Lu può pianificare diversi tipi di presa per oggetti inediti, anche quando sono disponibili solo informazioni visive parziali. Il loro potrebbe essere il primo metodo di pianificazione della presa per pianificare in modo esplicito sia la presa di potenza che quella di precisione.
Illustrazione del processo di estrazione delle caratteristiche visive. Credito:Lu &Hermans.

Esempio di immagine RGB generata dalla telecamera Kinect2 che mostra il robot e l'oggetto simile a Lego sul tavolo. Credito:Lu &Hermans.
I ricercatori hanno valutato il loro modello e lo hanno confrontato con un modello che non codifica il tipo di presa. I loro risultati suggeriscono che la modellazione del tipo di presa può migliorare il tasso di successo delle prese generate, con il loro modello che supera l'altro metodo.
"Crediamo che i nostri risultati siano importanti in due modi significativi, " disse Hermans. "In primo luogo, il nostro approccio proposto consente a un robot di selezionare esplicitamente il tipo di presa che desidera, risolvere il problema che ci siamo proposti di affrontare. Secondo, e potenzialmente più importante, l'aggiunta di questa conoscenza del tipo di presa nel sistema migliora effettivamente la capacità del robot di afferrare con successo gli oggetti. Così, anche se vuoi un solo tipo di presa, dire che il potere afferra, aiuta ancora sapere che esistono prese di precisione quando si impara ad afferrare."
L'approccio ideato da Hermans e Lu potrebbe aiutare lo sviluppo di robot in grado di generare una serie diversificata di prese. Ciò alla fine consentirebbe a questi robot di completare una più ampia varietà di compiti, che comportano diversi tipi di manipolazione degli oggetti.

Esempi di successi di precisione e di presa di potenza generati dal nuovo approccio di modellazione del tipo di presa per la pianificazione della presa. Le prime due righe sono prese di precisione. Le due righe inferiori sono prese di forza. Credito:Lu &Hermans.

Prese di precisione (a sinistra) e di potenza (a destra) generate dal nuovo pianificatore di presa. Credito:Lu &Hermans.
"Stiamo ora esaminando due estensioni dirette di questo lavoro, " disse Hermans. "In primo luogo, vogliamo esaminare gli effetti della modellazione di più tipi di prese, Per esempio, distinguendo tra sottotipi di prese di precisione caratterizzati da diversi segmenti del dito che entrano in contatto con l'oggetto. Per raggiungere questo obiettivo, stiamo progettando di aumentare la mano del robot con la pelle per consentire il rilevamento automatico di dove vengono effettuati i contatti. Secondo, desideriamo incorporare più informazioni per aiutare nella selezione automatica del tipo appropriato di presa dato un compito richiesto. Per esempio, come può il robot decidere automaticamente che deve usare una presa di precisione per creare un dipinto, senza che l'operatore lo dica?"
© 2019 Science X Network