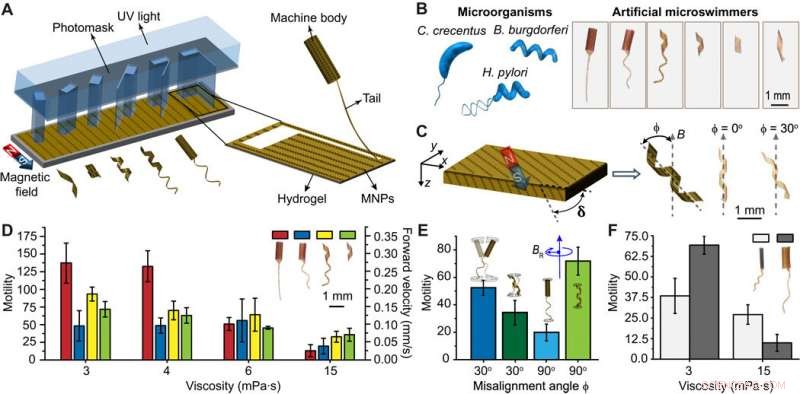
(A) Un approccio kirigami alla costruzione di micronuotatori morbidi personalizzati di massa attraverso una fotolitografia in un unico passaggio. UV, ultravioletto. (B) Illustrazione schematica dei batteri presi come ispirazione per questo studio e le immagini ottiche dei micronuotatori artificiali ingegnerizzati. (C) L'allineamento fuori piano (δ ≠ 0) degli MNP porta ad un angolo di disallineamento diverso da zero (ϕ). Vengono mostrate le immagini ottiche che mostrano due nuotatori con forme identiche e variabile. (D) Un confronto della motilità dei micronuotatori che nuotano in fluidi con viscosità diverse. (E) Motilità dei micronuotatori tubolari flagellati e dei micronuotatori elicoidali codificati con due diverse anisotropie magnetiche rotanti in una soluzione con una viscosità di 3 mPa·s. (F) Effetto delle dimensioni corporee sulla motilità dei micronuotatori tubolari. I nuotatori sono stati guidati a 2 Hz con un'intensità di campo di 20 mT in tutti gli esperimenti, salvo diversa indicazione. Tutti i grafici a barre rappresentano la media ± SEM (n =6 misurazioni per ogni micronuotatore e tre diversi nuotatori testati per condizione). Credito:progressi scientifici, doi:10.1126/sciadv.aau1532
I batteri mostrano una notevole plasticità sfruttando la meccanica in risposta a condizioni fisiche e chimiche che cambiano localmente. Le strutture conformi di solito aiutano il comportamento dei loro taxi a navigare all'interno di ambienti complessi e strutturati. I meccanismi microbiologici bioispirati contengono architetture progettate razionalmente in grado di deformazione non lineare per introdurre autonomia nei dispositivi ingegnerizzati su piccola scala.
In un recente studio, HW Huang e colleghi dei dipartimenti di ingegneria meccanica, matematica applicata e fisica teorica, hanno analizzato gli effetti delle forze idrodinamiche e della reologia dell'ambiente circostante sul nuoto a basso numero di Reynolds. Nel lavoro, hanno identificato le sfide ei vantaggi dell'utilizzo dell'accoppiamento elasto-idrodinamico in locomozione per sviluppare una serie di macchinari per costruire microrobot non collegati con mobilità autoregolata. Gli scienziati sono stati in grado di dimostrare l'accoppiamento tra le proprietà strutturali e magnetiche dei micronuotatori artificiali con le proprietà dinamiche del fluido, durante la locomozione adattativa in assenza di sensori a bordo. I risultati sono ora pubblicati in Progressi scientifici .
I microrganismi contengono diversi macchinari per il movimento molecolare per navigare efficacemente in ambienti complessi e nicchie ecologiche. Nei batteri, il nuoto nasce dalle interazioni meccaniche tra i flagelli azionati, corpo cellulare e la resistenza generata dal flusso. Le forze viscose a basso numero di Reynolds sono responsabili della resistenza idrodinamica, che a sua volta dipende dalla forma degli oggetti in movimento.
Per ottimizzare la loro motilità, i batteri possono assumere forme e dimensioni alternative nel corso del loro ciclo vitale. Oltre a cambiare la forma del corpo, i batteri possono anche utilizzare sistemi propulsivi per il movimento avanzato in ambienti complessi. Per esempio, piegando un uncino Caulobacter crescentus può aumentare la motilità, mentre Vibrio alginolyticus può superare l'Escherichia coli multiflagellato nell'arrampicata sui gradienti di nutrienti a causa dell'instabilità di instabilità flagellare. Per di più, Shewanella putrefaciens può sfuggire alle trappole fisiche attraverso una transizione polimorfa nel filamento flagellare.
Nuotatori artificiali microscopici che i ricercatori hanno sviluppato tramite la microingegneria bioispirata per muoversi attraverso i fluidi corporei, attraverso le barriere biologiche e l'accesso a siti remoti di malattia potrebbe rivoluzionare le terapie mirate. Il lavoro pionieristico nel campo ha già dimostrato la fattibilità di imitare il flagello procariotico o eucariotico per costruire micronuotatori controllati magneticamente con movimento non reciproco. Però, a differenza delle cellule viventi, questi dispositivi meccanici non possono percepire il loro ambiente locale o adattarsi ai cambiamenti nelle condizioni fisiche. Il controllo dei materiali artificiali può aprire la strada alla creazione di sintonizzabili, soluzioni ingegneristiche durevoli e robuste come dispositivi robotici bioibridi autonomi.
Nel presente lavoro, Huong et al. introdurre un metodo semplice e versatile basato sulla fabbricazione di materiali per progettare micromacchine morbide a controllo magnetico. Il concetto si basa su un sistema multicorpo riconfigurabile 3-D progettato da un monostrato di idrogel nanocomposito. In precedenti lavori condotti dallo stesso gruppo di ricerca, Huang et al. ha dettagliato la forma e il profilo di magnetizzazione delle micromacchine auto-piegate in cui le strutture potrebbero essere programmate in modo indipendente incorporando nanoparticelle magnetiche (MNP) in strati di idrogel modellati.
Per questo studio, gli scienziati hanno presentato una serie di strategie di progettazione per autoregolare il movimento e la manovrabilità attraverso l'interazione tra viscoso, elastico, forze magnetiche e osmotiche. Huang et al. dimostrato che il corpo riconfigurabile potrebbe trasformarsi continuamente in base al fluido circostante, consentendo il movimento attraverso le costrizioni per migliorare le prestazioni della locomotiva. Hanno dimostrato che l'accoppiamento elasto-idrodinamico negli adattamenti del cambiamento di forma e dell'andatura potrebbe consentire ai microbot di navigare all'interno ostruiti, ambienti eterogenei e dinamici.
Ruolo del piano corporeo sulla manovrabilità. I micronuotatori elicoidali hanno mostrato le migliori prestazioni come previsto perché non si occupano della coordinazione del corpo e della coda. Credito:progressi scientifici, doi:10.1126/sciadv.aau1532.
Huang et al. ha progettato i morbidi micronuotatori usando la locomozione bioispirata con una variante dell'origami nota come kirigami. Le microstrutture 3D conformi sono state progettate da un gel termoreattivo rinforzato con MNP (nanoparticelle magnetiche). Durante il processo di fabbricazione, gli scienziati hanno iniziato a tagliare tramite fotolitografia e piegare dopo l'idratazione dello strato polimerizzato. La distribuzione non uniforme di MNP lungo la direzione dello spessore ha permesso la formazione di due strati distinti di idrogel con rapporti di rigonfiamento significativamente differenti.
I ricercatori si sono concentrati su tre configurazioni di microrganismi, compreso C. crescentus, Helicobacter pylori e Borrelia burgdorferi. I batteri nuotano tipicamente ruotando i filamenti flagellari simili a eliche che si estendono dal corpo cellulare. La biomimetica del movimento potrebbe consentire ai micronuotatori artificiali di muoversi, se il momento magnetico della macchina fosse perpendicolare al suo asse lungo. Però, le strutture invece assomigliavano ad aghi di bussola, allineando il loro asse lungo alla direzione del campo magnetico esterno. Per superare questo limite, Huang et al hanno variato l'allineamento fuori piano degli MNP innati nel materiale, mantenendo costante l'allineamento delle particelle nel piano.
Registrazione dinamica del profilo di magnetizzazione. I nanocompositi rinforzati magneticamente erano in una direzione diversa da quella dell'allineamento MNP. Il campo applicato era significativamente più alto del campo magnetico applicato per allineare le particelle durante la fabbricazione dei microbot. Credito:progressi scientifici, doi:10.1126/sciadv.aau1532.
Per ottimizzare il movimento a diverse viscosità, le microstrutture hanno acquisito andature differenti. Per esplorare sistematicamente il potenziale vantaggio della diversità morfologica Huong et al. costruiva micronuotatori con differenti piani corporei e li azionava in fluidi a viscosità variabile. Gli scienziati sono stati in grado di progettare micronuotatori che hanno seguito traiettorie elicoidali 3D coordinando la loro morfologia con il loro profilo di magnetizzazione. In tutti gli esperimenti, il numero di Reynolds variava da 10 -2 a 10 -4 ; per indicare il nuoto sotto flusso laminare.
In una soluzione di saccarosio con la stessa viscosità del sangue, i micronuotatori flagellati con coda planare flessibile e corpo tubolare si muovevano più velocemente con movimento elicoidale rispetto ad altri prototipi. I micronuotatori flagellati hanno beneficiato del movimento sia elicoidale che a cavatappi, mentre i micronuotatori elicoidali eseguivano il movimento a cavatappi. Però, durante l'aumento della viscosità il movimento di tutti i micronuotatori diminuiva, ma il calo era più alto per i micronuotatori flagellati con una coda planare. A viscosità più elevate, Huong et al hanno osservato che i micronuotatori elicoidali erano i più veloci, poiché l'unico movimento rilevante nelle condizioni era il movimento a cavatappi.
Accanto al movimento, la capacità di regolare il movimento (manovrabilità) gioca un ruolo chiave nei batteri per rilevare e rilevare i gradienti di nutrienti. Gli scienziati hanno testato la manovrabilità dei micronuotatori artificiali inducendo deviazioni nell'angolo di imbardata (rotazione) durante il nuoto. Un micronuotatore altamente manovrabile potrebbe cambiare rapidamente la sua direzione di movimento con un piccolo cambiamento nel segnale di controllo. Durante le perturbazioni più forti (rotazione di imbardata di 45 gradi) sia la geometria del corpo che quella della coda hanno svolto un ruolo importante nella risposta dei micronuotatori compiacenti. Strutturalmente, il corpo ha risposto al segnale di controllo prima della coda, poiché la magnetizzazione del corpo era maggiore. I nuotatori con una coda planare hanno mostrato una maggiore suscettibilità alle instabilità, una coda elicoidale potrebbe contribuire comparativamente alla stabilizzazione a causa della maggiore rigidità della geometria elicoidale.
Adattamento della forma in canali curvi sotto flusso assiale con una velocità di 2 ml/min. La deformazione osservata era elastica, e i nuotatori hanno recuperato completamente la loro forma dopo aver attraversato l'angolo sotto il flusso applicato esternamente con una velocità di 2 ml/min. L'aumento della rigidità dei filamenti riduceva la deformazione e portava all'ostruzione del canale. Credito:progressi scientifici, doi:10.1126/sciadv.aau1532. 
Huong e collaboratori hanno determinato l'efficienza di propulsione dei nuotatori compiacenti accoppiando le forze magnetiche, flessibilità del filamento e resistenza viscosa. Hanno studiato le proprietà elasto-idrodinamiche per innescare una transizione dell'andatura in risposta al cambiamento della viscosità. Gli scienziati hanno osservato l'avvolgimento della coda del microbot a viscosità e frequenza più elevate. La transizione o trasformazione morfologica osservata, contribuito al movimento del cavatappi per una maggiore motilità dei microbot.

Adattamento dell'andatura dei micronuotatori tubolari con coda elastica. Le proprietà elastoidrodinamiche possono essere sfruttate per innescare una transizione dell'andatura in risposta ai cambiamenti di bassa e alta viscosità. Credito:progressi scientifici, doi:10.1126/sciadv.aau1532.
Sulla base di strategie complete di movimento e manovrabilità, i dati ottenuti nello studio hanno rivelato che un corpo tubolare con una coda planare era preferibile per nuotare a bassa viscosità. Comparativamente, una morfologia elicoidale potrebbe funzionare meglio a viscosità più elevate. Huong et al. costruito un micronuotatore magneticamente riconfigurabile per subire la trasformazione di forma tra le due configurazioni in base alle condizioni esterne. I micronuotatori programmati potrebbero cambiare forma per una velocità di avanzamento sostenuta e una maggiore manovrabilità nonostante l'aumento delle forze viscose.
In questo modo, attente analisi delle prestazioni di nuoto a diverse viscosità hanno fornito una linea guida per costruire una singola micromacchina. Per risolvere il problema della navigazione su micro/nanoscala, Huong et al. ridotto il numero di elementi da controllare per i conseguenti vantaggi di velocità, versatilità e costo. I microbot possono essere fabbricati tramite metodi scalabili e ad alto rendimento per aprire le porte allo sviluppo di una gamma di microrobot morbidi per applicazioni mediche e industriali.
© 2019 Science X Network