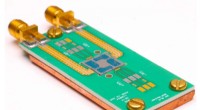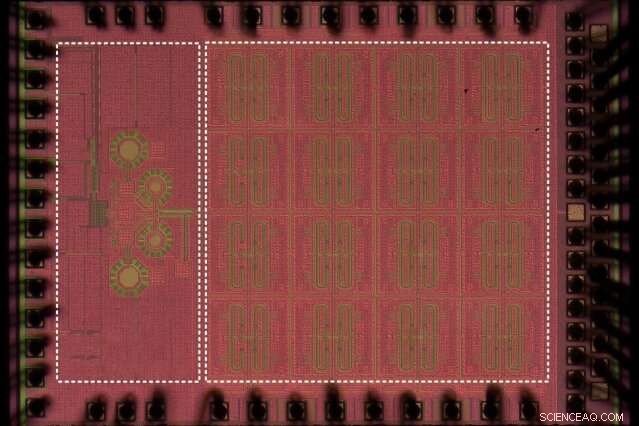
I ricercatori del MIT hanno sviluppato un chip che sfrutta lunghezze d'onda sub-terahertz per il riconoscimento degli oggetti, che potrebbe essere combinato con sensori di immagine basati sulla luce per aiutare a guidare le auto senza conducente attraverso la nebbia. Credito:Massachusetts Institute of Technology
I veicoli autonomi che si affidano a sensori di immagine basati sulla luce spesso faticano a vedere attraverso condizioni accecanti, come la nebbia. Ma i ricercatori del MIT hanno sviluppato un sistema di ricezione di radiazioni sub-terahertz che potrebbe aiutare a guidare le auto senza conducente quando i metodi tradizionali falliscono.
lunghezze d'onda sub-terahertz, che si trovano tra le microonde e le radiazioni infrarosse sullo spettro elettromagnetico, può essere rilevato facilmente attraverso nebbia e nuvole di polvere, mentre i sistemi di imaging LiDAR a infrarossi utilizzati nei veicoli autonomi sono in difficoltà. Per rilevare oggetti, un sistema di imaging sub-terahertz invia un segnale iniziale attraverso un trasmettitore; un ricevitore quindi misura l'assorbimento e la riflessione delle lunghezze d'onda sub-terahertz di rimbalzo. Questo invia un segnale a un processore che ricrea un'immagine dell'oggetto.
Ma l'implementazione di sensori sub-terahertz nelle auto senza conducente è impegnativa. Sensibile, un riconoscimento accurato dell'oggetto richiede un forte segnale di uscita in banda base dal ricevitore al processore. Sistemi tradizionali, costituito da componenti discreti che producono tali segnali, sono grandi e costosi. Più piccoli, esistono array di sensori su chip, ma producono segnali deboli.
In un articolo pubblicato online l'8 febbraio dal IEEE Journal of Solid-State Circuits , i ricercatori descrivono un bidimensionale, array di ricezione sub-terahertz su un chip che è ordini di grandezza più sensibile, il che significa che può catturare e interpretare meglio lunghezze d'onda sub-terahertz in presenza di molto rumore di segnale.
Per realizzare questo, hanno implementato uno schema di pixel di miscelazione del segnale indipendenti, chiamati "rilevatori di eterodina", che di solito sono molto difficili da integrare densamente nei chip. I ricercatori hanno ridotto drasticamente le dimensioni dei rivelatori eterodina in modo che molti di essi possano inserirsi in un chip. Il trucco era creare un compatto, componente multiuso in grado di eseguire il downmix simultaneo dei segnali di ingresso, sincronizzare l'array di pixel, e produrre forti segnali di uscita in banda base.
I ricercatori hanno costruito un prototipo, che ha un array di 32 pixel integrato su un dispositivo da 1,2 millimetri quadrati. I pixel sono circa 4, 300 volte più sensibile dei pixel dei migliori sensori array sub-terahertz on-chip di oggi. Con un po' più di sviluppo, il chip potrebbe essere potenzialmente utilizzato in auto senza conducente e robot autonomi.
"Una grande motivazione per questo lavoro è avere "occhi elettrici" migliori per veicoli autonomi e droni, " dice il co-autore Ruonan Han, professore associato di ingegneria elettrica e informatica, e direttore del Terahertz Integrated Electronics Group presso i Microsystems Technology Laboratories (MTL) del MIT. "Il nostro basso costo, i sensori sub-terahertz su chip svolgeranno un ruolo complementare al LiDAR quando l'ambiente è agitato".
Insieme a Han sul giornale ci sono il primo autore Zhi Hu e il coautore Cheng Wang, entrambi Ph.D. studenti del Dipartimento di Ingegneria Elettrica e Informatica che lavorano nel gruppo di ricerca di Han.
Progettazione decentralizzata
La chiave del progetto è ciò che i ricercatori chiamano "decentramento". In questo disegno, un singolo pixel, chiamato pixel "eterodina", genera il battito di frequenza (la differenza di frequenza tra due segnali sub-terahertz in ingresso) e l'"oscillazione locale, " un segnale elettrico che cambia la frequenza di una frequenza in ingresso. Questo processo di "down-mixing" produce un segnale nell'intervallo dei megahertz che può essere facilmente interpretato da un processore in banda base.
Il segnale di uscita può essere utilizzato per calcolare la distanza degli oggetti, simile a come LiDAR calcola il tempo impiegato da un laser per colpire un oggetto e rimbalzare. Inoltre, combinando i segnali di uscita di una matrice di pixel, e dirigere i pixel in una certa direzione, può abilitare immagini ad alta risoluzione di una scena. Ciò consente non solo il rilevamento ma anche il riconoscimento di oggetti, che è fondamentale nei veicoli autonomi e nei robot.
Gli array di pixel eterodina funzionano solo quando i segnali di oscillazione locale di tutti i pixel sono sincronizzati, il che significa che è necessaria una tecnica di sincronizzazione del segnale. I design centralizzati includono un unico hub che condivide i segnali di oscillazione locale con tutti i pixel.
Questi progetti sono solitamente utilizzati da ricevitori di frequenze più basse, e può causare problemi a bande di frequenza inferiori a terahertz, dove è notoriamente difficile generare un segnale ad alta potenza da un singolo hub. Man mano che l'array si ingrandisce, la potenza condivisa da ciascun pixel diminuisce, riducendo la potenza del segnale in banda base in uscita, che è fortemente dipendente dalla potenza del segnale di oscillazione locale. Di conseguenza, un segnale generato da ogni pixel può essere molto debole, portando a una bassa sensibilità. Alcuni sensori su chip hanno iniziato a utilizzare questo design, ma sono limitati a otto pixel.
Il design decentralizzato dei ricercatori affronta questo compromesso tra sensibilità alla scala. Ogni pixel genera il proprio segnale di oscillazione locale, utilizzato per la ricezione e il down-mix del segnale in ingresso. Inoltre, un accoppiatore integrato sincronizza il suo segnale di oscillazione locale con quello del suo vicino. Questo dà a ogni pixel più potenza di uscita, poiché il segnale di oscillazione locale non proviene da un hub globale.
Una buona analogia per il nuovo design decentralizzato è un sistema di irrigazione, Han dice. Un sistema di irrigazione tradizionale ha una pompa che dirige un potente flusso d'acqua attraverso una rete di tubazioni che distribuisce l'acqua a molti siti di irrigazione. Ogni irrigatore sputa acqua con un flusso molto più debole del flusso iniziale dalla pompa. Se vuoi che gli irrigatori pulsano alla stessa velocità, che richiederebbe un altro sistema di controllo.
Il disegno dei ricercatori, d'altra parte, dà ad ogni sito la propria pompa dell'acqua, eliminando la necessità di collegare le condutture, e fornisce a ogni irrigatore la propria potente erogazione d'acqua. Ogni irrigatore comunica anche con il suo vicino per sincronizzare la frequenza degli impulsi. "Con il nostro design, non c'è essenzialmente alcun limite per la scalabilità, " Han dice. "Puoi avere tutti i siti che vuoi, e ogni sito pompa ancora la stessa quantità di acqua... e tutte le pompe pulsano insieme."
La nuova architettura, però, potenzialmente rende l'impronta di ogni pixel molto più grande, che pone una grande sfida alla grande scala, integrazione ad alta densità in modalità array. Nel loro disegno, i ricercatori hanno combinato varie funzioni di quattro componenti tradizionalmente separati:antenna, miscelatore, oscillatore, e accoppiatore, in un singolo componente "multitasking" assegnato a ciascun pixel. Ciò consente un design decentralizzato di 32 pixel.
"Abbiamo progettato un componente multifunzionale per un design [decentralizzato] su un chip e abbiamo combinato alcune strutture discrete per ridurre le dimensioni di ogni pixel, " dice Hu. "Anche se ogni pixel esegue operazioni complicate, mantiene la sua compattezza, quindi possiamo ancora avere un array denso su larga scala".
Guidato dalle frequenze
Affinché il sistema possa misurare la distanza di un oggetto, la frequenza del segnale di oscillazione locale deve essere stabile.
A quello scopo, i ricercatori hanno incorporato nel loro chip un componente chiamato anello ad aggancio di fase, che blocca la frequenza sub-terahertz di tutti i 32 segnali di oscillazione locale su un valore stabile, riferimento a bassa frequenza. Poiché i pixel sono accoppiati, i loro segnali di oscillazione locale condividono tutti identici, fase e frequenza ad alta stabilità. Ciò garantisce che informazioni significative possano essere estratte dai segnali in banda base di uscita. L'intera architettura riduce al minimo la perdita di segnale e massimizza il controllo.
"In sintesi, otteniamo una matrice coerente, allo stesso tempo con un potere di oscillazione locale molto elevato per ogni pixel, quindi ogni pixel raggiunge un'elevata sensibilità, " dice Hu.
Questa storia è stata ripubblicata per gentile concessione di MIT News (web.mit.edu/newsoffice/), un popolare sito che copre notizie sulla ricerca del MIT, innovazione e didattica.